
I’ve always loved the Consolidated PBY Catalina, there’s something particularly pleasing about the layout of this flying boat. The most commonly used variants during W.W.II were the PBY-5 and the PBY-5a; the latter had a retractable tricycle undercarriage, which increased the gross weight by nearly 30% and would obviously have affected the number of depth charges or bombs the plane could carry. This is probably why the British favoured the lighter PBY-5.
The Americans, on the other hand, liked the amphibious version, which was more suitable for running ashore and was used extensively for air sea rescue purposes in the Pacific theatre. What more pleasurable sight than watching a PBY landing in a bay on some tropical island when you’ve just struggled to swim ashore in shark-infested waters after having the engine quit on your aircraft? There were also ‘Black Cat’ night bomber versions that got their revenge on Japanese shipping after many Catalinas had been destroyed at Pearl Harbour.
We Brits used Catalinas in the North Sea, mainly against U-Boats, but the most famous example was that which spotted the Bismarck, a reconnaissance mission that led to the German Battleship’s sinking in the Atlantic Ocean on 27th May 1941. The Catalina, incidentally, also saw action in the Mediterranean.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
NO MORE OILY RAG!
I’ve witnessed models of Catalinas in the past, but they’ve tended to be rather underpowered and heavy. Notwithstanding, the main thing that put me off attempting a version was how to hide the engines in the nacelles, which turn out to be rather small when the model is scaled to a reasonable size. The other difficulty was where to put the fuel tanks, the solution being either to build conformal wing tanks or some form of pumped system.
I’ve always been what I guess Alex Whittaker would call an ‘oily rag’ modeller, having remained (almost) faithful to glow motors for about half a century. That said, in the last few years I’ve been going through a sort of metamorphosis, thanks to Nigel Hawes. It started with scanning his articles, which later developed into careful scrutiny. I even generated a list of his more relevant articles that gave me a sort of encyclopaedia covering the developments in electric motors, speed controllers and batteries. Could electric flight technology offer a better solution for the Catalina?
It didn’t take long to decide that the answer was probably ‘yes’. The small nacelles are plenty big enough for the electric motors needed to fly it and the fuel tank issue disappears, with plenty of room in the cabin area to locate the flight battery. With this major headache over there was just one thorny question – how to replicate the complex shape of that fuselage.
PC TO THE RESCUE
I’ve used ‘Compufoil Professional’ on my PC for several years, a program that has many default wing sections and allows you to generate your own by filling in a table of co-ordinates. The Catalina fuselage cross-section is basically circular for the top half, with a float-shaped underside. I’d already installed a section for generating elliptical shaped formers, based on the standard formula for a circle and that would be fine for the top part of the fuselage, but what about the underside? Behind the ‘step’ this is a simple ‘V’-shape, which was easy to generate a section for, but at the front there was a distinct concavity to each side of the V.
Sitting down with a piece of paper I managed to derive a trigonometric expression for the shape, which the computer then solved for a range of values. These were then scaled and entered as co-ordinates for the front underside of the hull. The former heights and widths, together with the position of the chine line were then measured off a photo enlargement of the plan in Aircraft Profiles 169-192 and fed into Compufoil for each fuselage station. With this I was able to print out an accurate set of formers… or are they bulkheads for a flying boat?
I haven’t got a full CAD facility so I scaled the photo enlargement up and drew out the wing planform and fuselage side-view on heavy lining paper. Since the Catalina fuselage has a flat top in side view from just behind the cabin to the tail, the shape could be formed easily around a central keel by bending the sheet in one plane, after soaking overnight in ammonia solution.

Another detail that had to be sorted was how, exactly, to tackle the undercarriage. A ‘proper’ retracting retracting version would be difficult to make, requiring a lathe and milling facilities, whilst the alternative, a visit to Unitracts International, seemed a little too expensive. Retracts would also add significantly to the weight and introduce sealing difficulties when operating off water. Moreover, the nose wheel would retract into the space where the battery needed to be. A fixed undercarriage, on the other hand, would rule out operation from water… hmm. An plug-in undercarriage was one option, as was a disposable ‘dolly’, but in the end I decided to simply slide the model off grass with the aid of a bungee.
MODEL CATS
The first Catalina I built spanned 76” (1930mm) and was powered by a pair of Jamara Pro 480HS BB brushed motors. Just ailerons and elevator were used to minimise weight, with the tip floats fixed in the raised position. In order to maintain a scale propeller size of 8” whilst operating the motors efficiently, suitable gearing was needed. Accordingly, a range of MP Jet gearboxes with different ratios were purchased and I got down to some experimenting. These particular ‘boxes, incidentally, have a very neat arrangement that allows the motors to rotate in the normal direction with minimal lateral displacement of the drive axis. Anyway, Figure 1 shows the set-up used for testing.
The difference in ‘weight’ with and without the motor running gave the static thrust, which was recorded along with current taken at different battery voltages. I was interested in finding out the conditions required for the motors to provide the highest static thrust consistent with reasonable current draw, and several types and sizes of propeller were tested along with alternative gearboxes.

A 3:1 gearbox gave the best performance, providing just over 1 lb (0.4kg) of thrust when turning at 7,740rpm, this at 10.7V whilst drawing 9A. Although slightly more thrust was produced with the 2.33:1 gearbox, the current rose from 9A to 15A. Having carried out these tests I’ve concluded that brushed motors aren’t inherently inefficient, and when I tried to run the same items on 3-bladed propellers with 2.33:1 gearboxes they heated up and started to smell at the higher cell counts.
The motors of this first Cat’ ended up with a 10-cell GP3300 battery fed through an Xtra-40 speed controller, the servos and Rx being fed via a battery eliminating circuit.
ONWARDS & UPWARDS
Now bitten by the Catalina bug I couldn’t resist building a larger example (pictured here) with proper operational wing tip floats and that would ROW (Rise Off Water). Having decided on a scale of one inch to the foot, giving a wing span of 104” (2642mm), the biggest issue was motor choice. One option was to use larger brushed motors with sturdier gearboxes capable of handling the extra power, but I was aware of the developments in outrunner brushless motors and decided that this was the route to take. Since outrunners operate without a gearbox and don’t have brushes or a commutator, they offer a significant weight saving.
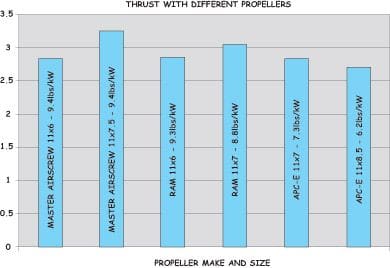
I opted for a pair of AXI 2820/12 motors controlled by M.troniks 40A Genesis speed controllers, each running on a separate 10-cell GP3300 battery. The table shows that the best choice of propeller during tests was an 11 x 7.5” Master Airscrew, turning at 8,500rpm, producing 3.25 lb (1.5kg) of thrust per motor and drawing 30.6A.

Building the two Catalinas with different types of electric motor provided an excellent opportunity to make comparisons. I was quite taken back when comparing the thrust per kW figures for the two types of propulsion system, with the AXI 2820/12 giving 9.4 lb (4.3kg) per kW and the Jamara Pro 480 giving 10.7 lb (4.8kg) per kW. The low weight, small-size brushless outrunner did of course provide a much higher absolute thrust, and avoided the complexity of a gearbox. Brushless motors also have the advantage of being able to maintain thrust levels over time, unlike brushed motors that tend to suffer a falling off in performance as brushes wear and commutators blacken.
Anyway, I was secretly delighted with the figures provided by the two AXIs, weighing only 5.3oz each they provided 6.5 lb (3kg) of thrust between them, which compares well with the brushed motors – 4oz each including gearbox – in the smaller model that generated 2 lb (0.9kg) of thrust in total. One other surprising result was the superior performance of the standard Master Airscrew propeller over the special electric APC ‘E’ propellers, which have received very favourable press reports over the years.
INFERNAL INTERFERENCE
Noise suppression on brushed motors is usually achieved by simply connecting a ceramic capacitor from each motor terminal to the motor casing, with a third capacitor connected between the two terminals. Brushless motors are different; whilst they have no brushes to generate noise there are still large transient currents flowing in the windings. These currents aren’t confined to just the motor as they also run along the leads into the speed controller. It’s therefore important to do a range check with just the servos operating and then again with the brushless motors running; when I did this with the Catalina the reduction in range was spectacular. The question was whether interference was being radiated and picked up by the Rx or whether it was being conducted back down the throttle channel lead into the Rx. The first possibility was eliminated by disconnecting the lead into the Rx and using a pulse generator to provide the 1 – 2mS pulses to control the speed controller… the problem disappeared. So, interference was clearly being conducted back down the lead into the Rx. I wondered if M.troniks had identified the problem, and when I rang them it transpired that not only were they aware of it but they had a solution (in the form of an opto-coupler) that was to be released in a couple of weeks. As such I ordered two of the first batch and these duly solved the problem.
SPACED OUT
That’s all for now, In part.2 I'll look at the large Cat’ in more depth, then put it through its paces.
- This article was first published in 2006.


