
In Part.1 I introduced you to my pair of electric-powered Catalinas: a 76" (1930mm) span version powered by a pair of Jamara Pro 480HS BB can motors for bungee-launching from grass, and a 104" (2642mm) version powered by two AXI 2820/12 brushless outrunners, for operation from water. Whilst the smaller Cat' had its wing tip floats permanently fixed in the raised position, I decided that operational tips were an absolute must on its larger, amphibious sister. By studying photos of the full-size aircraft and the plan from which the model had been scaled I was able to determine how they worked, but I didn't have any information on the internal mechanism. It seems reasonable to assume that some form of screwjack was used, but I didn't feel able to reproduce a scaled-down version of this system and decided instead to simply pull them up with nylon fishing line, using a winch to provide the required 5" (51mm) of movement.
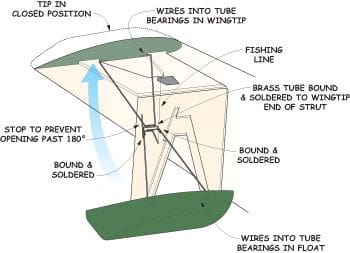
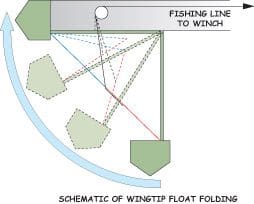
The two winches are situated just outboard of the wing joint, and the lines run through drinking straw tubes out to near the tips where they pass over pulleys and down to the centre of the folding mechanism as shown in Figs 4 and 5. Torsion springs situated at the wing tip end of the folding strut mechanism provide tension in the lines and ensure the floats lower completely such that the struts snap into the straight position – this, of course, avoiding collapse in the event of side loads on landing. The winches are a pair of Futaba 3001 servos that I modified by replacing the feedback pots with 12-turn trim pots from RS Components (RS part no. 187-214). This is a bit tricky, but I had done it before to provide the flap mechanism on a C130 Hercules (see RCM&E Nov. 2005). There's room for the 12-turn pot in the space where the original pot sits, but it needs to be carefully centred in the cavity and jammed in place with pieces of balsa wood, then potted in with epoxy. A short drive shaft then needs to be made for the necessary mechanical connection into the output gear.
WING MATTERS
The Catalina's wing is situated on top of a pylon, within which the flight engineer sits. There's insufficient width on the model to make a solid wing fixing here, so the struts need to be functional. Now, the smaller model has a one-piece wing, with a tongue on the underside that slots into the pylon before being pushed forward to lock it into position. Struts are then hooked into the fuselage (hull) and the outer ends screwed to the underside of the wing.
Transportation and storage issues meant that a one-piece wing wasn't practical for the larger model, so the outer panels were made removable whilst the centre section (including the struts) is permanently fitted to the fuselage. The protruding spar ends of the outer wing panels plug into the centre section, and 8swg pins push through holes in the spars to hold them in place top and bottom. 9 way 'D-type' connectors are used to make the connections for the aileron and wing tip float servos. The larger model has rudder control and requires six servos altogether; too many for the BEC on the speed controller (which couldn't be used anyway, because of the need to use opto-couplers to solve the interference problem discussed last month). As a result, I used a separate four-cell 2000mAh NiMH pack to power the Rx and servos.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
SMALL CAT'
Getting the smaller model airborne presented its own particular problems as the fuselage is too wide to grip properly for a one-handed launch. Attempting to launch the model with both hands then trying to pick up the Tx before she hit the ground was clearly not an option, though in practice hand-launching by an assistant has worked fine. At 5 lb 3oz it’s not a particularly heavy model for its size, indeed with a modest 16oz / sq. ft. wing loading and thrust-to-weight ratio of 42% I decided that, for lone flying, I’d devise a method of launch that I call 'BASOG' (Bungee Assisted Slide Off Grass).
The launcher comprises a 5-metre length of surgical rubber tubing with a short piece of fishing line on one end, a loop in which locates over a tow hook under the nose of the model. The line extends behind the model, where a loop in the other end is staked to the ground with a screwdriver. The wing is kept level up to the point of release by resting the wing tip on something of suitable height. There's a piece of nylon covering material in the line that I stand on before pulling out the screwdriver and, having given the model a final check I step off the nylon and the model's away. This method of launch has proved most effective as the propellers are well clear of the ground and the hull slides easily on the grass.
Once airborne the small Catalina flies well with no vices; the thrust-to-weight ratio has proved adequate for a brisk climb, and the model can be throttled back considerably for sustained level flight. There have been some motor failures, though, and whilst there's been no sign of excessive brush wear or commutator damage, close examination has revealed (in every case) one of the springs carrying the brushes to be broken. The motors have been replaced by the supplier with the intention of returning them to the manufacturer in order to discover the likely cause of the failure. That said, at the time of writing there's been no progress with this investigation. It would seem that these motors are made in very large numbers and the manufacturer just isn't interested in investigating a tiny number of failures. Excessive current clearly isn't the cause, the only possible reason I can think of is that the springs hit a resonant frequency at a higher rpm than the motors are expected to run, leading to metal fatigue and, ultimately, failure. This could have been a result of a light propeller load whilst losing height in combination with the 10-cell battery pack voltage, which is higher than that specified for the motor; a problem that wouldn't have shown up on static test.
The advice from John Swain of Fanfare is to limit the battery voltage to eight (or possibly nine) cells. The present pair of motors seem to be okay on 10 cells so far, but in truth I haven't flown the model since commissioning the larger one. If I get around to flying it again I may purchase some lower voltage packs. The thrust-to-weight ratio would then be rather low compared to the larger model but with a BASOG launch and no need to drag itself out of the water it should have sufficient power.
BIG CAT'
Now, the larger model weighs 11 lb 5oz (5.1kg) and has a wing loading of a shade over 16oz / sq. ft., with a thrust-to-weight ratio of 57%. Being of only slightly higher wing loading but considerably bigger, the large model looks much slower and realistic in the air than the smaller version. Level flight can be maintained on a very low throttle setting, which conserves the flight battery very well. The first attempt at flight nearly ended in disaster, as the BASOG didn't have enough pull and I stalled her on lift-off. To solve this I made another launcher and used the two in parallel for getting the model off.
WATER SPORTS
Aircraft Profiles 169 – 192 give the gross weight of the PBY 5 as 26,200 lb (11884kg). The model weight required to achieve the correct water line is therefore 26,200 divided by 12 cubed, which is 15.16 lb. Anyway, with the model weighing considerably less than this, things looked very promising for a satisfactory rise off water. I decided to use the mixing facilities on my Futaba 9C Tx to provide differential throttles slaved to the rudder channel in order to provide the best possible manoeuvring on water (this facility can be turned off for flight).
Both of the model flying clubs that I belong to are set up for land flying, so I was forced to become a 'lone flyer' when operating off water. It's not easy to find a suitable site for flying model seaplanes in some parts of the country; the lakes that are available are in great demand by other users, although it's probably true to say that the chances of being accommodated with an electric aircraft are much higher than with i.c. power as the lack of noise can be emphasised. A lot of lakes have trees and undergrowth around their edges that can make recovery of a stranded model difficult, and of course weeds can be troublesome. Some lakes have salt or brackish water, which is bad news if the model gets dunked in it. An ideal site would be in open country with no trees and gently sloping sandy beaches all around, allowing the model to be slid into the water and beached at the end of the flight.

Operation is probably best carried out from the downwind end of the lake so that in the event of a failed take-off attempt the model will be blown back to land for recovery. Electric-powered models have an advantage over their i.c.-powered counterparts as there's no chance of the motors cutting out when the throttle's opened, and the motors can be stopped and started at will for manoeuvring on the water, particularly helpful when finding the best place for beaching. Fortunately, was able to find an expanse of water which met these requirements, though as it was quite large I was somewhat concerned about operating the model at the downwind end due to the size of the waves!
Putting a model flying boat in the water for the first time really is a terrific experience. Unlike operating on land, where the model usually stays where you put it, on water it gets blown around by the slightest breeze. It's amazing how low the resistance to movement is on water compared with tarmac! For my part, then, flying off the wet stuff is best left to those calm summer evenings, when it becomes a joyful and most memorable experience. The launching dolly I use is like those used on the full-size aircraft, and this was handy for pushing the model down the slipway usually used for easing full-size boats into the water. Once in the water the launching dolly is then unplugged and the model taxied out to open water ready for take-off.
Getting the Catalina to ROW (Rise Off Water) has proved to be more difficult than a BASOG launch on land. The problem is in keeping the wings absolutely level with the ailerons as the throttle is progressively opened, whilst at the same time steering with rudder to keep the nose into wind. Fail to do this or hitting a large wave can sometimes causes a wingtip float to dig in and produce what you'd normally call a 'water loop'… the marine version of a ground loop! Thankfully the model shows no sign of wanting to turn upside-down and dunk the motors and speed controllers in the process. That said the wing tip float folding mechanism takes quite a pounding so these have now been strengthened by using a heavier gauge of wire.
Once up to speed (which doesn't need to be very high with such a low wing loading), the model is simply lifted out of the drink with up elevator… and from then on it's easy. Flying the model around over the water is great fun, and it's really satisfying to raise and lower the wing tip floats. I read in the Aircraft Profile that there was no change in maximum speed between floats up and floats down on the full-size, although the drag should be lower with them up; it may be my imagination, but I think the model flies more smoothly with them up.

Landing is interesting! You can line her up for what on land would produce a really smooth landing, but on water the model can sometimes have a mind of its own once the first contact is made. I can see now why rallies for model flying boats are called 'splash-ins!' Thus far I've actually made only one landing where the hull planed along and one wing tip float settled into the water as the model slowed… a great thrill, I can tell you. I must practice until it hopefully becomes routine. Once settled in the water the taxi back to land can be difficult because, even in a slight breeze, she refuses steadfastly to turn across the wind. Weathercocking rules here, even with differential throttles. The best solution is to cut the throttles and let the model drift backwards downwind. Of course, all this can be solved by waiting for the flat calm just before dusk!
MISSION ACCOMPLISHED
As I said in opening article, I've always loved the Catalina… and this scratch-build project has been extremely satisfying. Whilst the smaller model flies a treat from its ground launch there's no denying that the ultimate satisfaction is from seeing the larger version skim across the lake, in its true element.


