
The Editor completes the build of RC Composite’s two metre slope soarer.
In common with lots of moulded models the Edge is not supplied with any instructions. I guess the rationale is that if you’ve got to the stage in your model flying career where such a model appeals then you should have enough experience to piece it together. But everyone has to start somewhere so even a few brief notes would be helpful.
Fortunately, Composite RC have uploaded several useful tutorials on their YouTube channel ‘Composite RC Gliders GmbH’ for various models. There’s also a collection of customer build photos.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
Also, I have discovered that it is an updated version of the RCRCM Typhoon, which has been in production for over ten years. Long term RCM&E readers may even remember Andy Ellison’s review of an early production kit in September 2010, although the model has been developed since then. So, an online search for building advice using that name should yield some useful tips. Hopefully this review will be of assistance to future Edge builders too!
WING SERVOS
I made a start on the wing panels. The first job was to glue the epoxy glass control horns in position at the leading edges of the ailerons and flaps. The control surfaces are bottom hinged so they can be folded back by 90 degrees to allow access to the leading-edge material at each horn location, indicated by blisters moulded into the wings and control surfaces. All that is required is to drill out a hole for each control horn, lined up with the centre of each blister, which I then secured using 30-minute epoxy.

To make each hole I used a narrow cone Perma-Grit rotary tool in my Dremel. This makes quick work of grinding away the composite materials, but it is easy to go too far and to start breaking through the wing skins at the back of each shroud, which you can see traces of in the pictures. So, take it easy.

I also found that the blisters are quite thick, and it was necessary to grind away some material from their insides to provide enough clearance for the spring metal clevises to be attached and to work without interference. However, each blister seemed to be mostly composed of gel coat, so it crumbled away easily, especially when attacked by a fast-spinning rotary file! This left some tatty edges, so I used a much finer rotary abrasive stone to restore a curved edge to each one. All this grinding takes its toll, with the end result that my blisters are a lot more exposed than when they started out. But at least my pushrods all run nice and free!

Each control surface is operated using short pushrods made of studding with metal clevises at each end. This is where the Edge is starting to show its age as the modern way to operate thin wings is via integrated drive systems, which do away with the large blisters needed to cover the pushrods.

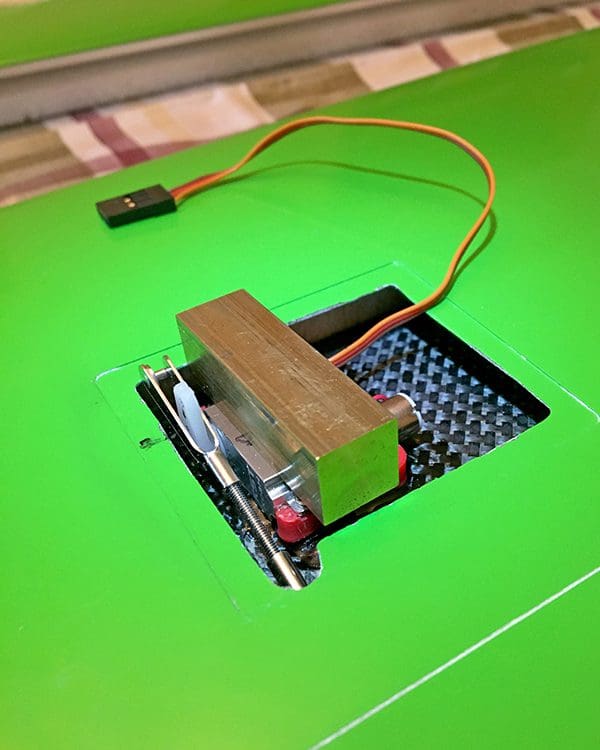
Another pointer towards the age of the design is that the servo bay holes in the bottom skin of each wing panel are much larger than they really need to be for the latest breed of wing servos, especially if using the small KST X08H servos that Composite RC supply as part of the Full Build package being reviewed.
These tiny servos look a bit lost in the large servo bays, where they use up only half of the available space. However, it does give you the option to fit a wide range of alternative wing servos if you have a preference for a larger type.
TRIAL RUN
The position of each wing servo is dictated laterally by the position of each pushrod, which you’ll want to run as straight as possible. When you fit a pushrod to each control horn, you’ll notice that it appears at the extreme edge of each servo bay.

To get a full range of movement from the short servo arms it’s also necessary to Dremel out a crescent of material from the lower arm of each clevis to stop it from binding on the output shaft of the servo – see picture nearby. The height of the pushrod may also be restricted slightly by the back edge of the servo bay so this will need sanding back a bit to give a bit more movement; I used a cylindrical stone to gently grind a rounded slot for the pushrod to rise up into. Again, the nearby picture should make this clear.

Time now to hook up each servo, after screwing them to their mounts, and to make sure that you get full and free movement of each control surface as required. I find a servo tester to be invaluable for this as it saves having to have a receiver and transmitter close to hand. And with no trim function available it forces you to really make sure that you position things so that the servos are properly set up around neutral.

Each servo is covered by a neatly moulded epoxy glass cover, each with a raised blister for the clevises and servo arms to rise into. When deciding on the final position for each servo you also need to make sure that this blister coincides with the topmost position of each servo arm. However, it soon becomes obvious that the blisters on the covers are slightly out of line with the pushrods, so the edge of the cover nearest to the pushrod will need trimming back slightly to allow the arm and its clevis to sit centrally inside the blister.
It really is worth taking lots of time to check the correct position of each servo and to get the offsets right, especially regarding the flaps, to make sure that you get a good range of movement without the pushrods binding. Once you are happy with the position of each servo it can be marked, and the mount and wing skins prepared for finally gluing each servo into position.
ALL GLUED UP
Nearby are a few pictures and captions to illustrate how I fitted the KST servos to the Edge 2000 X wing panels.





TAIL END
Attention now turns to fitting out the fuselage.
The rudder is side hinged using the glass cloth used in the fin moulding. The gel coat is neatly scored at the hinge line on one side to allow movement, whilst the glass cloth is neatly cut away on the other side. The rudder pushrod is a carbon shaft with a length of studding glued in and fitted with a metal clevis. This is factory fitted at the rudder, leaving nothing to do at the back of the fuselage.
Likewise, the elevator pushrod, formed from another strong carbon shaft, is ready connected to the All Moving Tail bell-crank, which is also factory fitted. So, there’s nothing to see here, folks, either! However, as anyone who has built a model with an AMT tail will tell you, it’s very easy to get the bell-crank slightly misaligned, resulting in a wonky tailplane. But there’s no such worries here and I have to say that this particular AMT set up is probably the most accurate that I have come across.
The tail halves slide onto two short carbon rods; a thin one at the back goes through the trailing arm of the bell-crank and operates through crescent shaped slots in the fin skins to give the full range of elevator movement. Meanwhile the thicker front rod goes through the main pivot point of the bell-crank. As supplied, it is slightly oversize and needs sanding down to fit. A small piece of fine sanding paper wrapped around the rod, whilst twisting the latter to gently remove material, is all that is required to hone it down to the correct size. If you do go too far and you find that a tail half is a loose fit, then the old trick of coating the rod in glue from a Pritt-stick or similar should be enough to hold it temporarily in place during flight.
RADIO BAY
Attention now turns to fitting out the radio bay. This simply consists of fitting the rudder and elevator servos and connecting them to the pushrods. You’ll also need to find a home for the radio battery pack and the receiver. All this is covered by a snugly fitting nose sheath.


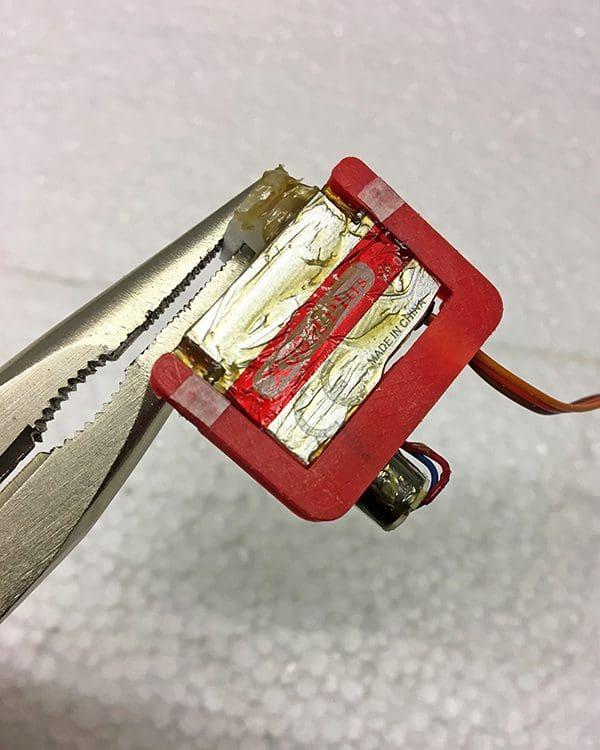
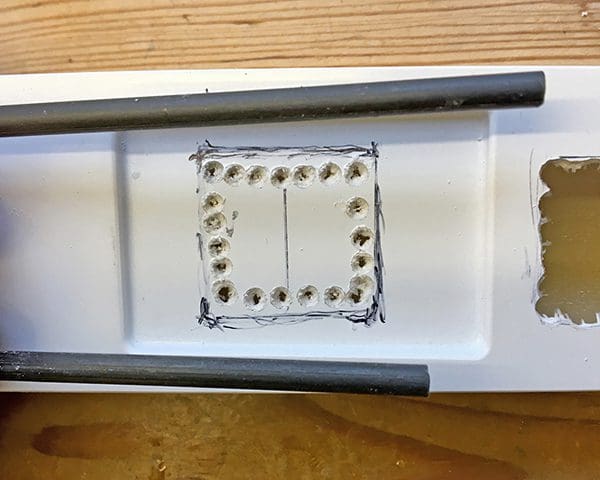
For this job a Dremel or similar rotary tool is your best friend. I started by cutting out a slot for the Li-Ion battery pack that is supplied as part of the Full Build Kit. I drew around the pack with a black marker pen to indicate a rough shape to cut out. Then I used the Dremel fitted with a pointed abrasive stone to ‘drill’ out lots of holes around the inside edge of the marked rectangle. For this job a stone works as well as a twist drill and it has the benefit that you can use it straight away to start moving the cut sideways to ‘connect the dots’. Pretty soon you will have a rough battery size rectangle cut out, the edges of which can be smoothed out with a file. I used a combination of Perma-Grit files to do this.
The same technique can be used to cut out slots for the two tail servos. I placed mine around the centre of the slightly indented servo area but in hindsight I should have placed them slightly further forwards as there wasn’t a lot of room afterwards to run all the servo leads up and into the receiver. I just about managed it but placing the servos an extra 5mm or so forwards would have made things a lot easier.
The servo tray material is quite thick but to play safe I fitted some small strips of triangle stock balsa under the lip on each side; when the servo mounting holes were drilled, I dribbled some thin CA into each one to provide some extra bite for the servo screws.
With the servos in position and centred using the servo tester it was time to cut the pushrods to length. Each servo is connected using a length of studding with a metal clevis at one end. I marked the centre of each piece of studding so that one half could be used for adjustments whilst the other half could be glued into the pushrod using 30-minute epoxy. After a trial run and making sure that both the rudder and the AMT bell-crank were centred, I marked the pushrods and parted them off with a circular disk in my Dremel.
The ends of the studs were coated in epoxy before inserting them into the cut ends of each pushrod and the clevises connected to the servos. After a quick check of the back end to make sure that everything was still centred the pushrods were left well alone for the epoxy to set.
CONNECT UP
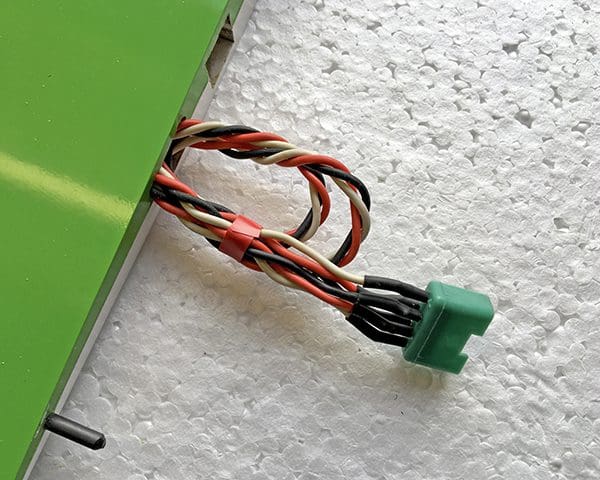
The Edge is supplied with two-part switch harnesses for the wing servos. The wing half of each harness is easily threaded through to the wing roots, but it soon becomes obvious that they are perhaps intended to be shared with a larger span model in the Composite RC range as there is quite a bit of spare lead. I decided that the best way to deal with this was to simply make a couple of large loops, loosely help by wraps of insulating tape, and to feed the loops back into the wings just behind the roots.

The other half of each harness needs to be fed down the fuselage until the two pairs of servo connectors appear in the servo bay. Easier said than done with a wooden cross brace and the centrally mounted ballast tube getting in the way, but eventually I teased them all through. To make space for all the leads I had to Dremel out a bit more of the servo tray behind the servos.
Mind you, running the servo harnesses down the fuselage was child’s play compared to threading the receiver aerials through in the opposite direction! However, after a few choice words suitable pull cords made it through and I could Velcro the PowerBox receiver in place between the two pushrods. Again, a suitable slot has to be cut out for the Rx to slide into.
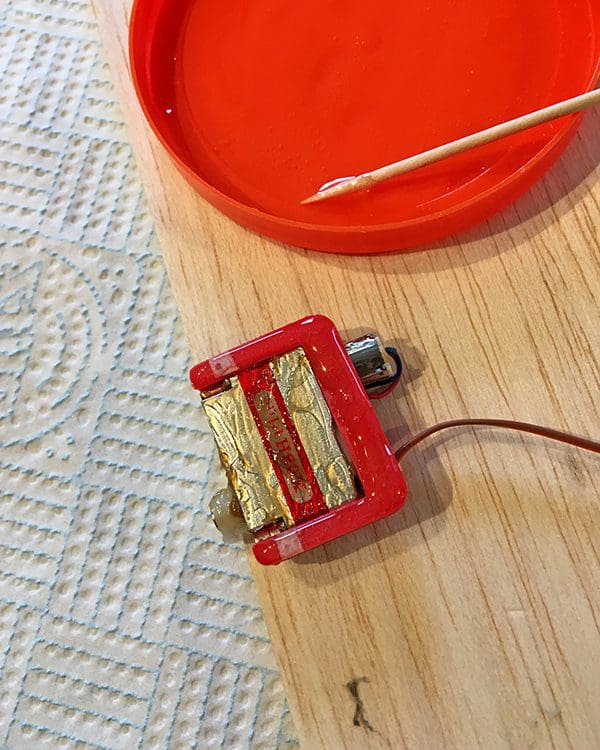
As well as a Li-Ion battery pack the Edge Full Build kit includes a slim magnetic switch, a sensible option as space is at a premium in any modern glider fuselage. Supplied by a company called Zepsus, I had not used one of these before, but it seems to work well, with a close pass of the included magnet being all that is required to switch the radio on and off. The obvious place to mount the switch was on the battery tray, next to the Li-Io pack. I was thinking that I would need to take the nose sheath off every time to activate it but it actually works through the side of the nose so it can stay taped on during a whole flying session.
FINISHING TOUCHES
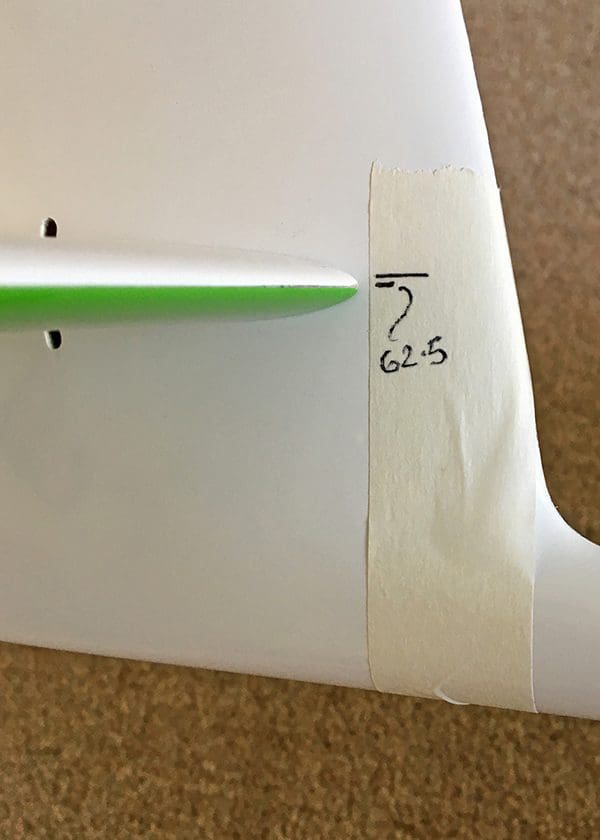
Just in front of the battery is enough room for a few nose shaped sheets of lead cut from roofing flash. When the lower space is full, you’ll probably also need to add a few extra grammes of lead on top to achieve the recommended Centre of Gravity of 86 – 89mm. I wrapped all the nose weight in black insulating tape, just to tidy it up a bit. This will also make it easy to take some away if dive tests show the model to be nose heavy during the test flights.

My last job was to stick on some of the CNC cut ‘spider’s web’ graphics that Composite RC supply as an optional extra. These are quite complex and as I haven’t got a lot of experience (any in fact!) of attaching large sheets of vinyl I have to admit to chickening out and reverting to the old method of spraying the wings with soapy water, peeling off each ‘web’ at a time and placing them on the model before using a beer mat to squeegee any excess water out from underneath the sticker.

I used just a few rings on each wing and tail panel, and I am pleased with the finish it gives. But if you want to see the ‘spider’s web’ graphics in full then just take a look at the picture at the start of this article, which shows Composite RC Gliders’ own display model.

DATAFILE
Wingspan: 1.998 mm
Wing area: 32 sq. dm.
Flight weight: 1470g
Wing loading: 45.9 g/dm. sq.
Airfoil: JH 6/8
Fuselage ballast: 19mm dia. x 33mm (x10)
Wing ballast: Optional 252g steel joiner
Controls: Elevator, Rudder, Ailerons, Flaps
Electric version:
Motor mount: 34 mm
Spinner: 35 mm
Motor: A20-12XL
ESC: Hacker X-30-pro
Battery: 3S 2400 mAh LiPo
Propeller: 11″ x 6″


