YOU WILL NEED:
1. A servo, complete with fixings and a plastic servo arm.
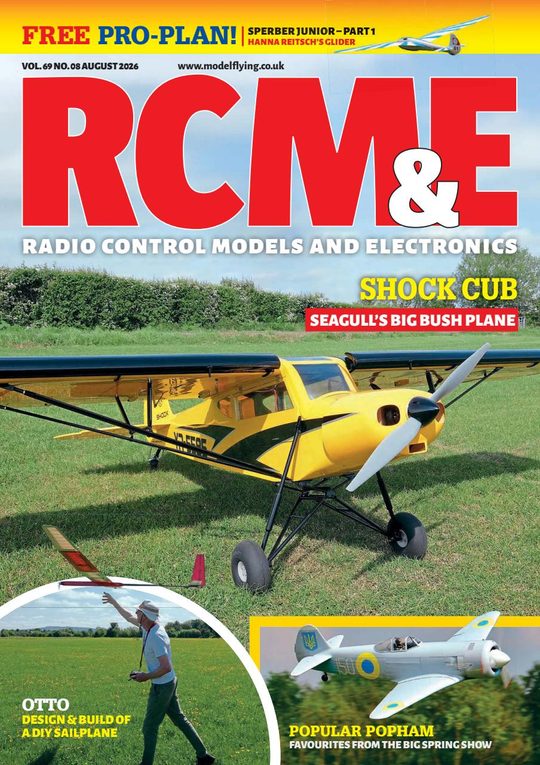
2. A control surface horn and its screw fixings.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
3. A piano wire pushrod, either from plain wire or with one end threaded.
4. One metal clevis.
5. A swing keeper.
6. A threaded coupler.
7. A ring of neoprene fuel tube.
1. There are many different ways of making the connection between a standard servo and a control surface. These are the basic items employed in most sport, scale and ARTF models to form a reliable, slop-free link with one adjustable end.

2. The servo should be fitted in accordance with the manufacturer’s instructions (see Back to Basics in the October 2012 edition). In this particular instance the servo is screwed to hardwood rails built into the wing structure.

3. Remove the servo arm, power-up your radio gear and ‘centre’ the servo using the transmitter’s trim button. Replace the servo arm in the required position – commonly at 90° to the pushrod – then cut off any unwanted extensions to prevent fouling.

4. Place the horn on the control surface so that it’s directly in line with the pushrod and mark the fixing points. Normally the holes that take the clevis will be directly over the hinge line of the control surface (as here).
5. Some horns screw into ply plates built into the control surface. My preference is to use small nuts and bolts that clamp either side of the control surface or, if the section is too thick, captive nuts on the inside of ply plates.
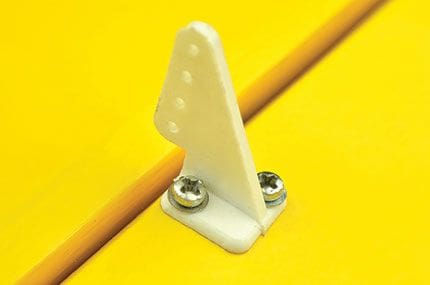
6. With the servo centred and the control surface set to neutral, measure between the hole in the control horn and the servo arm. This will be the finished length between the clevis pin and the right angle (or Z-bend) at the servo arm.

7. If using a threaded rod, attach the clevis leaving sufficient thread for adjustment in both directions. Using the measurement obtained in item 6, create a right angle bend in the plain end to take a swing keeper. A Z-bend won’t need a keeper, of course!

8. If you’re using plain unthreaded wire, these threaded couplers are specifically designed to be soldered onto the wire pushrod. Before soldering takes place, however, the end of the wire must be polished to a bright finish. I use emery cloth for this job.

9. If using a threaded coupler, solder it onto the plain wire pushrod. A 70 – 100 watt soldering iron will make light work of this job.

10. Now screw the clevis onto the coupler, once again leaving sufficient thread to allow for final adjustment in either direction. Use the measurement obtained from item 6 to make your right angle or Z-bend.

11. Connect the Z-bend or swing keeper to the servo, then check to make sure the servo is still centred. With the control surface held in the neutral position adjust the clevis to the required length and snap it in place.

12. With the servo reconnected check that you have full defection in both directions, without any binding. Finally, adjust the control throws in the ‘end point’ menu to suit the recommendations for the model.
DID YOU KNOW?
A servo arm can easily be moved off centre when test fitting the pushrod, therefore it’s worth powering up the system in order to check the servo centre before making any permanent cuts or bends… Having an adjustment at either end of the pushrod means that, in theory, the rod can, through vibration, work loose. Some ARTF (Almost Ready to Fly) models supply control linkages in this way and include locking nuts to prevent this from happening. Always remember to fit these with threadlock and check them regularly… Exposed control linkages such as this are vulnerable to damage in transit so always check them once you arrive at the field. Don’t let the model tell you there’s a problem once it’s in the air… For ‘belt and braces’ many fit a ‘keeper’ to prevent the arms of the clevis parting. A ring of neoprene fuel tube is ideal for this.