
Nigel Cartwright describes his own-design turbine helicopter
Not one for off-the-shelf models, I do enjoy building and flying the quirky and unusual. My background is in industrial modelmaking, engineering prototyping and the like, and in recent years I’ve been getting more into 2D and 3D CAD, as well as 3D printing. If I can, I’ll make a part rather than buy it!
FOR STARTERS
Having set out my stall, I thought I’d kick off by describing a somewhat unique helicopter build – my own-design, turbine-powered Jetcat PH2. This story started many years ago when I first joined Model Helicopter World magazine. The editor, Jon Tanner, had a big pod-and-boom Zealous turbine model and on my first trip to the field with him he nonchalantly handed me the Tx and said, “Here, have a go.”
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
The biggest and most expensive model I’d flown at the time was a Hirobo Shuttle, so this was a bit of a step-up! I was hooked… the noise, the smell… I ended up building a Bergan Magnum 44 with a Wren 44 turbine. Having done that, another opportunity arose.
Jon had acquired a Jetcat PHT2 turbine and had fitted it into an EC120. When it was later removed for an electric conversion the Jetcat became available. I wasted no time in acquiring it (on easy terms!) but what to put it in? Scale models appeal but I do enjoy a bit of an engineering challenge. During a trip to the JetPower show in Germany I’d seen a ‘turbine trainer’ fitted with a bigger Jetcat; it was beautifully built, with all the craftmanship there on show.
Back at home and inspired, I got busy on the computer. Definitely busy, just not very quick – this project has taken several years to complete. If you can see dust in the photos, it’s genuine!
PHT2 DESCRIBED
It’s worth a quick description of the Jetcat PHT2 first so you can see how I ended up designing what you see here. Based on the Jetcat P60 it has a single stage standard turbine that drives the heli mechanics directly from the main shaft sticking out of the compressor intake. This output shaft has a tiny pulley on it, with a rubber belt taking power to a 10mm rotor shaft via a series of belts and gears (I’m too scared to work out how fast that belt is travelling!)
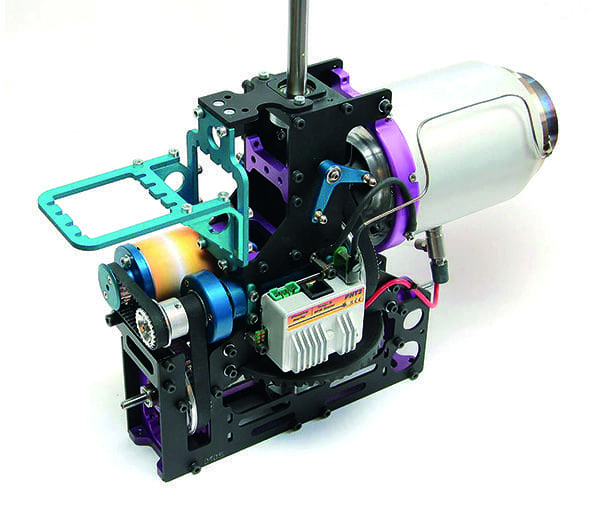
The package includes a compact set of side frames, main gear and shaft, auto unit, clutch, combined starter and generator (the PHT2 recharges the ECU battery while you fly) and a tail rotor output shaft. All in, the unit weighs just 2.2kg. There’s even a servo tray and bell-cranks ready for your choice of swashplate.
GENESIS
I’d been thinking about using Vario parts during the build and had started looking for either parts or a donor model, when Jon Tanner came up trumps. When I collected the PHT2 he handed me a box that contained the mortal remains of a crashed Vario Extreme that were slightly bent here and there, but the bits I wanted – the rotor head and tail gearbox – were useable. I also salvaged the skid tubes and the tail boom mount (a substantial aluminium casting). Even better, the salvaged purple anodised bits matched the purple Jetcat fittings!
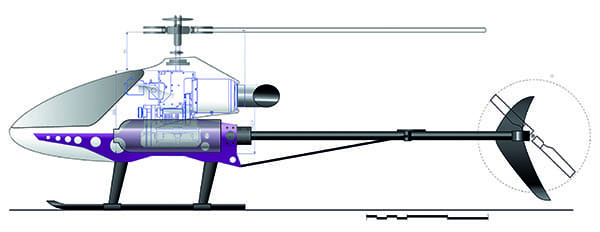
My initial sketches threw up an issue with the layout. On the PHT2 the turbine is above the tail drive, which would leave the boom and fin very close to the ground. Scale helicopters often use a flexible drive or transfer gearboxes that lift the tail rotor up. A lot of head-scratching ensued, until the penny dropped – the whole PHT2 unit can be run upside down (yes, I checked with Jetcat) by simply turning the main shaft and gear over; the main shaft then pokes out of what was the bottom of the chassis. I now had a high boom and low exhaust but lost the servo tray, which I solved later on.

When I started this project, I was doing a lot of 2D CAD and a bit of 3D, so my first preference was to simply lay out the parts in 2D. Jetcat kindly supplied me with a .dxf CAD drawing of the PHT2, over which I could then accurately trace the side frames, crucially ensuring the attachment point of my side frames matched theirs.
Why a second set of frames? Well, I needed to attach the servos, tanks and the Vario tail boom mount, which is much wider than the narrow PHT2 frames, so as the parts were added to the drawing it made sense to add secondary frames to link everything up.
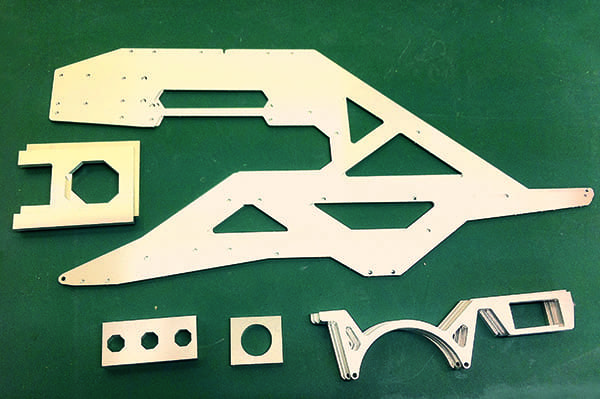
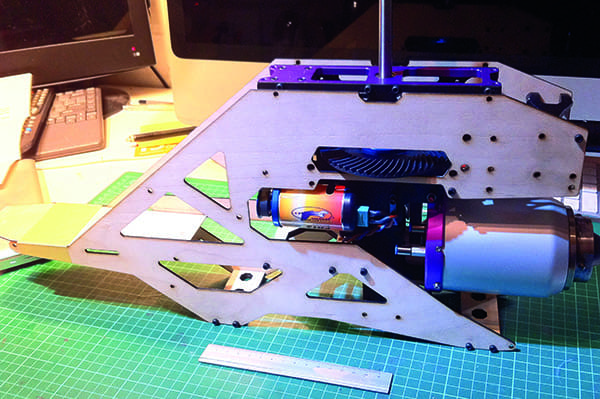
The design came together quickly, but before committing to cutting aluminium I had a set of side frames cut from plywood, just to check things would fit together okay. Happy that all was well I tasked a friendly local sign maker to cut a set of 2mm aluminium side frames on his CNC machine, along with the 5mm thick tank/servo mounts and frame spacers. All the parts were then anodised in the aforementioned matching purple for the frames and black for the other parts. I also had a few carbon fibre parts cut – tail fins, U/C legs and radio trays.
Assembly was straightforward, bolting the frames to the PHT2 by carefully removing the existing bolts holding the Jetcat chassis together and replacing them with longer bolts passing through my frames and some 10mm aluminium spacers, ensuring nothing could move that might affect the gear meshes.
To give the model something to sit on I fitted the carbon fibre U/C early on, its design and fixing method cribbed from another model (the name of which escapes me). It’s clamped in place with spacers cut at 45º, bolted to the bottom of the chassis. The skids are clamped with small, stainless steel P-shaped clamps.
CANOPY CAPER
Pondering what to do about the canopy, I initially looked at using a chopped-around canopy from another model, but nothing seemed to fit or look right. It really had to sit tight around the tanks and servos, so I bit the bullet and made one, creating a plug, moulds and then a GRP canopy.

Making the plug was a real exercise in making a mess… I wrapped the bare chassis in clingfilm, added a laser-cut plywood outline on the vertical and horizontal centrelines, and then covered the whole lot in two-part expanding foam. A couple of hours of carving and sanding later yielded a pleasing shape – very rough, but ready for skinning with glass and filler.
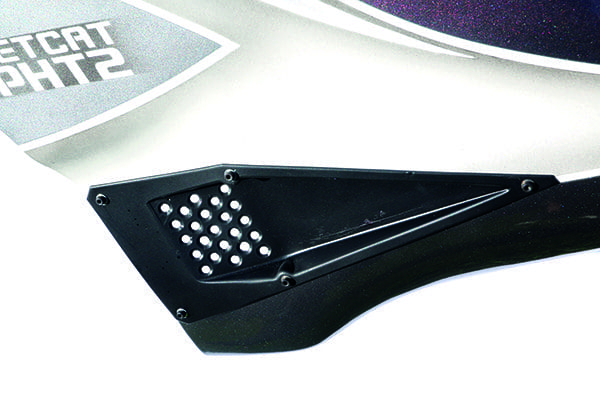
It did look a bit slab-sided, so I made some simple vac-formed air intakes, painted them black and bolted them into holes cut in the canopy. The paint job was car paint and a bit of airbrushing, finished with a two-pack clear coat from an aerosol.
PLUMBING & WIRING
While the assembly of the basics was quite quick, it seemed to take forever to sort out the plumbing and wiring – hence the gathered dust! I sorted the fuel and gas-start lines first, connecting up the main tanks, air trap, small gas tank (fitted above the front U/C mount), fuel pump and electric valves.
The air trap is held in place with a Velcro strap, the width of the tank conveniently matching the gap between the frames but mounting the little gas tank had me stumped for a while. I eventually modelled a simple mount and had it 3D printed in nylon.
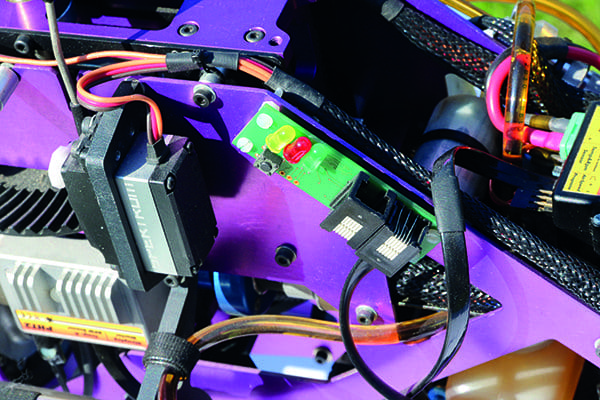
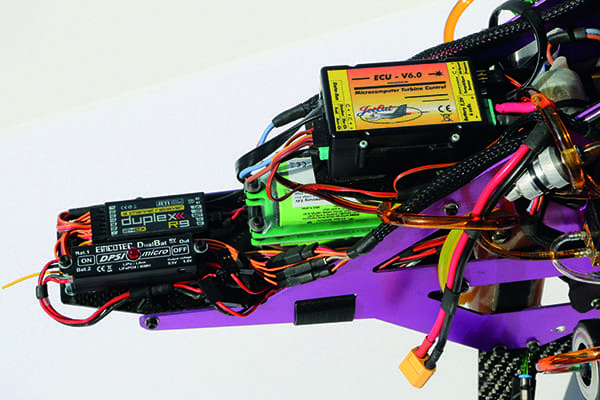
I spent quite a while trying to decide where the Jetcat’s fairly large Electronic Control Unit (ECU) would go, along with the Rx and batteries. I use a dual battery power setup, with twin Emcotec 2,900mAh Li-Ion Rx batteries feeding a Jeti Rx and Spektrum 6030 servos via an Emcotec power switch and regulator.
I always take ages to complete wiring, making it as neat as possible in the hope that tidy wiring is reliable wiring. Slung under the front of the chassis the ECU battery (a Hacker 2S 3,800mAh LiPo) is kept charged during flight by the starter generator unit.

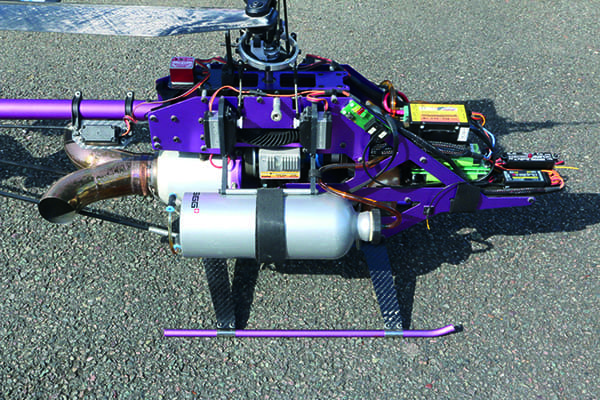
The fuel tanks are the same as the Bergen machine, i.e. one litre Sigg aluminium water bottles, modified with flat caps. I also added a sight tube and vent using Festo fittings on the rear ends – it’s very handy to see how much fuel is in the tanks!
FINAL FIT
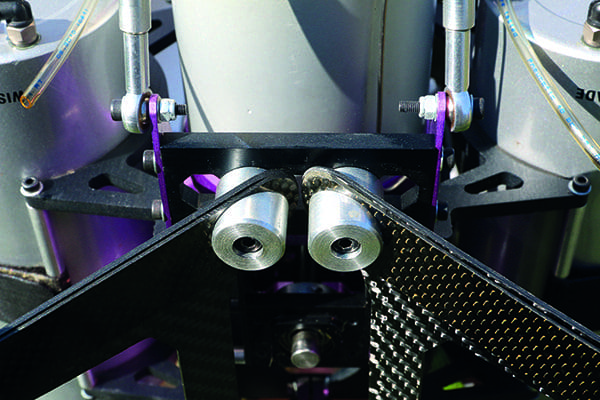
With the tail boom mounted on its cast mounting I used a Vario rubber-cruciform universal joint to link the Vario torque rod for the tail drive onto the Jetcat shaft. It took a bit of searching for the right parts, but the end result works well
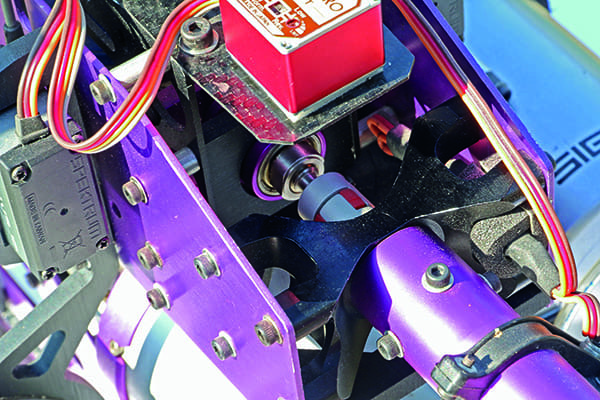
The final details also took a little while! Neither the main shaft fitted to the PHT2, nor the one I had from the Vario Extreme, was the right length, so I had a new one made from silver steel with the Jesus bolt and main gear holes in the right place.

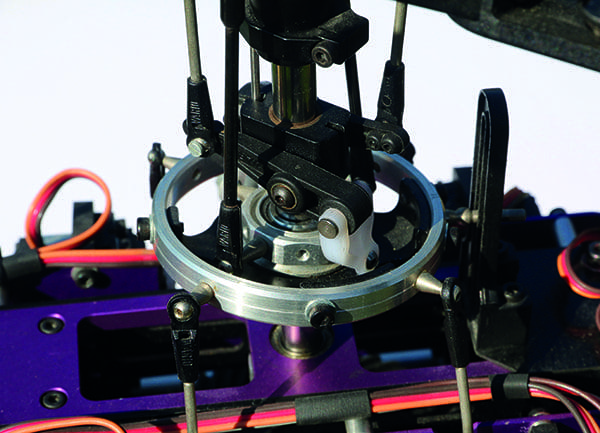
I then realised that the swashplate from the Extreme was set up for three servos and an anti-rotation pin, whilst I needed balls for four servos and a pin; I could have bought a new swashplate but in the end I turned an aluminium ring, bolted it to the swashplate in three places, and added the required balls at 90º around the circumference.
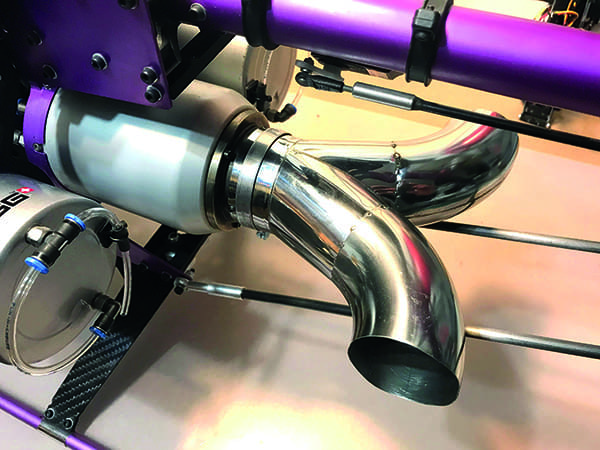
The exhaust had to be diverted away from the tail boom and boom stays, which I sorted by fitting a stock ‘trouser’ Zimmermann exhaust, secured by a screw hose clip.
SET UP…
It takes a while to work through the Jetcat manual, calibrating the ECU to match the radio input, but after a couple of reads it slowly becomes clearer. After following the simple procedure for purging the fuel system of air, I performed a couple of ground engine runs, pitching and rolling the model by hand to ensure all the air had been removed from the fuel lines.
The PHT2 has a governor, so the throttle curve is run at 100% and the model is flown on pitch only, the ECU keeping the head speed constant.
…AND FLY!
At the end of the day this is just another pod and boom helicopter, it just happens to have an unusual powerplant. It flies like any other Vario heli – very smooth, stable and fun to throw around a bit when you want to with loads of power on tap from the turbine. It’ll never do 3D but that’s not really what it’s for – the thing about turbine flying is to enjoy the sight, sound and (occasionally) the smell!

Building this model has taken longer than was ever intended, but it’s been worth the wait. Flying a turbine-powered model that includes a lot of your own design & build effort is very satisfying!



