
Everyone likes ‘looping the loop’ when they’re learning to fly, and it’s a good thing too; we all need a bit of light relief during training sessions. However, there’s more to a perfected loop than just pulling in ‘up’ elevator. Ultimately you’ll be using all four primary controls (throttle, aileron, rudder and elevator) to nail the definitive loop.
Surprisingly difficult to perfect, properly executed loops are smooth flowing and accurate figures. The manoeuvre often suffers from poor positioning and / or entry, whilst wind strength and direction can also cause problems. The loop is traditionally a central manoeuvre performed in front of the pilot. Whilst learning there’s a natural tendency to fly the model relatively close in – not a major problem, but it can sometimes cause a loss of perspective and what’s perceived as a ‘round’ loop actually turns out to be egg-shaped! So, it’s worthwhile asking someone in your club to take an overall view of your manoeuvre when you’re feeling more confident with it.
POSITION
Assuming you’re pretty comfortable with the straight and level aspect of your piloting skills (see last month for a refresher), decide on your planned flight path before beginning. Choose a landmark or reference point on the horizon to use as a centre marker. Such a reference point is more commonly used in competition but is useful at this stage in attempting to make the loop circular. The manoeuvre is easiest to perform heading directly into wind, so bear this in mind when planning your loop-practising flight path.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
In my view the secret to a nice loop is to perform one of a size that matches the models ability. Too small looks rushed, too big and it’s hard to fly nicely and the model can run out of steam at the top. The height and therefore the diameter of the loop is set by the available power – as you go over the top it should be a steady but well-controlled curve. If the model wallows up to the top then it has either been slowed too much or it hasn’t got enough power. If your aircraft comes down the other side in a hurry then there’s either too much speed or the loop is too small.
Correct entry and use of power is important. These factors are variable and can alter a little depending on the power available and the model type, so treat the following notes and illustration as a guide and experiment yourself.
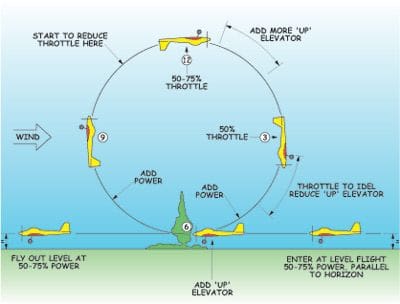
Using a 12-hour clock face to describe the position of the model at any given time (Fig. 1), approach the bottom and start of the loop (6 o’clock) with level wings and in a straight line at average speed, using in the region of 50 – 75% power. A second before hitting the bottom (and centre) of the manoeuvre according to your landmark, gently but confidently pull in some up elevator. You’re likely to reach the required elevator input by about 7.00 – 7.30; add in some more power around this point as the nose-up attitude will begin to cause momentum decay.
At 9.00 the model is vertical and probably at full power. You might need to reduce the elevator a little if it’s windy – in this position the model may be pushed into the loop. In relatively calm conditions and under normal circumstances you just hold on. At 11.00 – 12.00 begin to reduce the throttle.
At the top of the loop the power should be back to around 50% – 75% and the model should line up with the centre marker on the horizon. If not then the first part of the loop has gone wrong somewhere. Assuming you’re on track, begin to pull back on the elevator a little more (adjusting as necessary to counteract wind conditions), gently but confidently increasing the input through 1.00 and 2.00. By 3.00 the throttle should have been decayed to 50%, with idle occurring at between 3.00 and 4.00.
Approaching 4.00 the elevator input is relaxed a little as the wing begins to attract more lift and the model tries to fly into the loop. Start to increase the throttle soon after, at about 5.00, so that when the model is back at the bottom it’s at the original power setting for straight and level flight.
That all sounds a bit convoluted and complicated however with practice it will come more and more naturally, believe me. Remember, you must FLY the manoeuvre – if you need a bit more or less power or elevator here or there then so be it, but make all control inputs smooth and steady, never ‘snatched’.
AILERON AND RUDDER
What we’ve not talked about so far is aileron and rudder input. Most sports models won’t be set up like a well-honed aerobatic ship, so as indicated above you need to fly it all the time – this is good discipline since flying a bad model well is better than flying a great model badly.
It’s very easy for a wing to start dropping when entering a loop, which will send the model off course and make a bit of a corkscrew of the manoeuvre. There are adjustments that can help remove unwanted side effects on a model, but it’s good practice to learn to fly it straight – you’ll never own an aeroplane that does everything all on its own!
Concentrate on keeping the wings level throughout the loop using aileron control. Sometimes its hard to see where and when things are going wrong, so again, ask a clubmate to watch and report any problems.
Rudder is a key control in perfecting a loop, and whilst you might begin by doing all of your directional adjustment with the aileron, rudder should ultimately take over. Correct use of the rudder can correct small wing drops, so keeping the loop on track.
Here are the key areas that can go wrong when performing a loop:
– Entry and exit of the manoeuvre not level.
– Exit of the manoeuvre at a different height to the entry.
– The manoeuvre is not a circle. Wandering off-centre is the common cause of this – hence the use of a reference point.

WIND CORRECTION
As you get more confident with the loop start taking a closer look at the shape scribed by the centre of gravity point of the model. That’s the bit that draws the shape for the perfect loop. Sometimes you’ll have the model at an attitude that’s different to the direction of the flight path… er, I’ll explain.
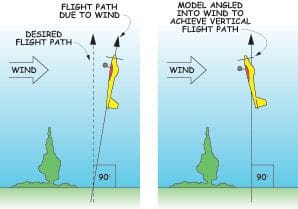
A true vertical ascent or descent demonstrates this well. A pure vertical ascent in zero wind conditions would have the model pointing 90° (i.e. perpendicular to the ground) as it heads skywards. Add a force 5 wind, and in the same attitude the vertical ascent might start on the left side but finish on the right as the wind blows the model downwind. To prevent this the nose of the model is angled into wind a little (Fig. 2), so that it’s not perpendicular to the ground. The result is that the attitude of the model isn’t vertical but the flight path is. The same applies to a more subtle extent around a loop; you must manage the controls effectively to prescribe a circular flight path and not necessarily a manoeuvre where the model is pointing precisely forward the whole time.


