David Watson converts a pusher prop powered jet style model into EDF by employing 3D printed components.
During the 2020 lockdown I converted an established model design, Pushy Cat, from pusher-prop to EDF using own designed and printed 3D components. As an introduction to 3D printing, it was an excellent project. It even resulted in a practical flying model!
This article is a build record with an emphasis on the 3D printing aspects. Hopefully it will act as taster introduction regarding what is possible when complementing conventional build techniques with 3D print capabilities.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.

BACKGROUND
So, what does a 3D printer actually do? Unlike the ubiquitous home computer text and photo printer this one prints molten plastic instead of ink but in layers! The print head, in effect, moves in three dimensions relative to where the print bed is located.
The arrangement can be seen in the photo of my printer: Fig.1. The ‘bed moves backwards and forwards to give ‘Y’, whilst the printer head moves left and right to give ‘X’. with the assembly being moved up and down in ‘Z’ axis courtesy of two screw jacks. Four precision stepper motors provide the drive.
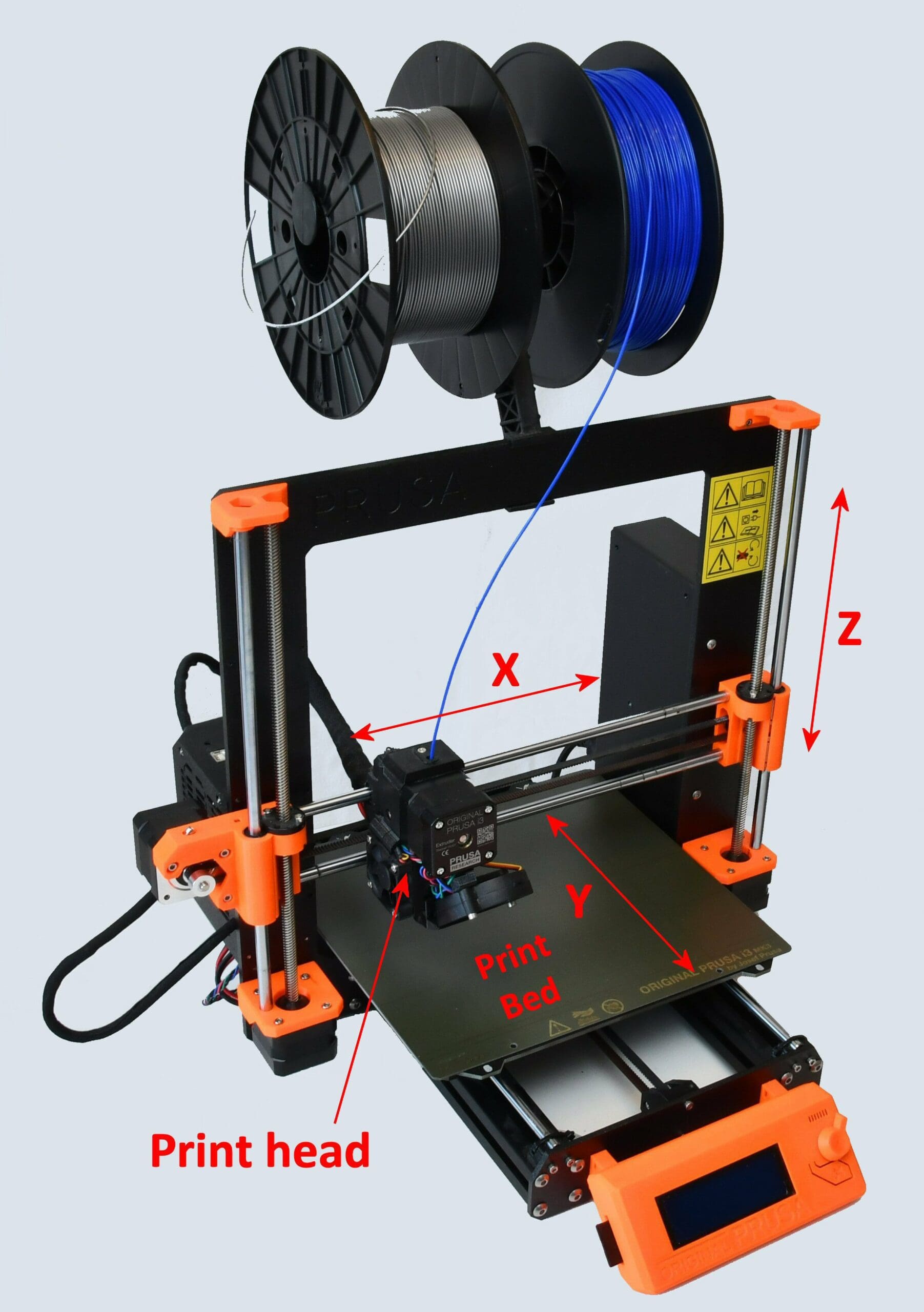
The plastic is melted and deposited in thin layers by the print head, one upon the other, to ‘grow’ the desired item in layers. The thinner the layer the better the print quality but the price to pay is extended print times. These can be measured in several hours for large projects. Overnight is a good option for some prints.
Fidelity and print times decrease with thicker layers so it’s a trade-off. Layer thickness is controlled via the set-up menu, but a good compromise seems to be 0.2mm.
There is a lot to know about the subject, too much to write about here, but hopefully I can give you enough to fire your interest with particular reference to our shared interest. As is normal these days there is a wealth of information and guidance on the internet and several good books are available too.
BASIC PROCESS
A design is assembled in software. Either you do that, or you download an oven-ready one from the internet. A download is often free, in particular those designs uploaded by enthusiasts. Have a look at thingiverse.com
There are several packages you can use to design your own item. The one I started with was ‘Tinkercad’ and Google will locate this for you. It principally lives online so you don’t have to download a huge block of software and install it on your machine. It gets even better since it is free! In my view Tinkercad is a good place to start to learn design techniques and principles, it is very intuitive, and you don’t need a 3D printer to try it out.
Having completed a design, it is saved or ‘exported’ to your home computer hard disc. A popular file format carries the .stl extension. To print, the .stl file is processed by a piece of software called a ‘Slicer’, which you will have installed on your computer. There are free competent slicers available online to download. Slicing is a simple process. ‘Cura’ is a slicer that seems to have a good reputation but I have not used it myself. I have contented myself with the slicer provided with my printer.
The slicer analyses your design and outputs a data file with a .gcode extension. This is the file your printer will understand. I copy the .gcode file to an SD memory card, slot it into my printer and, in effect, press the ‘Go’ button. Not hard! A good slicer allows you to rotate and view your object of desire from pretty much any angle. In addition, it is possible to inspect a cross section at any height of the print just by pulling a slider with the mouse. These features are invaluable for checking print integrity prior to setting off on a six-hour print! Fig.2 is an image sequence demonstrating the latter control option.
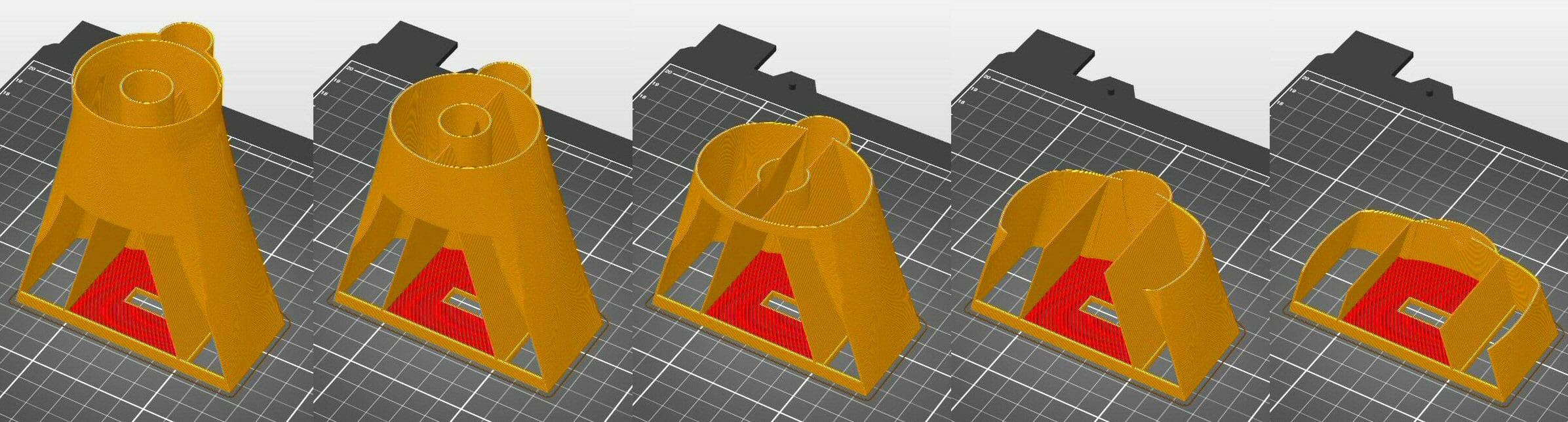
It may be possible to directly connect the printer to your computer and drive it via a USB cable. But I have a preference for the SD card route as it avoids comms and computer failures.
The raw plastic print material used is a circular cross section filament and 1.75mm diameter is common. Note the two reels adorning the top of my printer. There’s a wide selection of colours available and it is commonly acquired by weight. There are a number of derivatives on the market, each having their own limitations and features.
So far, I have only printed with the popular PLA (polylactic acid). It sounds frightening but it is safe, does not have an odour and is reputed to be manufactured from renewable resources so that may tick a few boxes for you!
IN THE BEGINNING
A little under two years ago I decided on a Prusa 3D printer, the i3 Mk3S as shown. I had been fascinated by the potential of such things ever since I attended a Bournemouth University demonstration many years ago of what was then referred to as a RepRap machine. I believe the name was derived from the idea that it was capable of self-replicating as it could print several of its component parts itself.
At the time I wanted one but could see the technology was very much in its infancy. I decided to wait awhile until further lessons had been learned and designs honed. Meantime, I read some ‘idiots’ guides to pick up the basics. So, in 2019, I took the plunge and purchased a Prusa self-assembly kit for the i3, Mk3S. The instructions indicated it could be assembled over a weekend… It took me two weeks but, in my defence, it was not exactly full-time.
I would recommend this route to 3D printing for any competent model builder if they wished to save a few pennies. You literally learn the nut and bolt intricacies of your machine by doing so, which can be useful! I made a couple of silly mistakes along the way but nothing serious. They were realised quickly and rectified.
The text that follows gives a clue as to my personal learning curve. I do not promote myself as an expert in this business, more someone who has learned enough to design and manufacture 3D printed parts to complement my hobby and wishes to share the experience. Hopefully, it will fire your interest!
INTO ACTION
So, having learned some of the basic stuff and done a few simple prints, I decided I should attempt something a little more challenging. This coincided with the March 2020 lockdown so it looked like I might have the time to give it a go. I also wanted a model project to keep me occupied and that is when I rediscovered my archived Ron Laden’s Pushy Cat design from Q&EFI magazine, January 2005.
Coincidentally, scrabbling through one of my ‘may-come-in-useful-sometime’ boxes, I found an EDF unit saved from a small plastic F-18, which I never managed to get airborne. The model would effortlessly cavort around the tarmac like a demented squirrel but, sadly, little else – a strip and bin job. So, the little grey cells slowly focussed on a jet-propelled Pushy Cat employing a 3D printed EDF housing.
I decided to construct the model conventionally in wood but only the forward two-thirds of the fuselage, terminating it at F3. The structure aft would be 3D printed and house the EDF. I reasoned that if it didn’t work out, I could simply build the original pusher-prop arrangement separately and bolt it on later!
Fortunately, I had the required balsa on the shelf. I commenced with the truncated fuselage build and then decided to make life immediately difficult by 3D printing the detachable canopy. But how? My design knowledge at that time was rather less than it is now!
In the main, 3D design and printing is only limited by your own three-dimensional scheming and imagination. As builders of flying models, I like to think we are all generally well endowed with reasonable capability in that respect.
CANOPY
I started by forming a solid tube in software, which in effect was the canopy form and its mirror image stuck together, base to base. Please note, this is a route I would not now take but I have included it here for completeness and demonstration purposes.
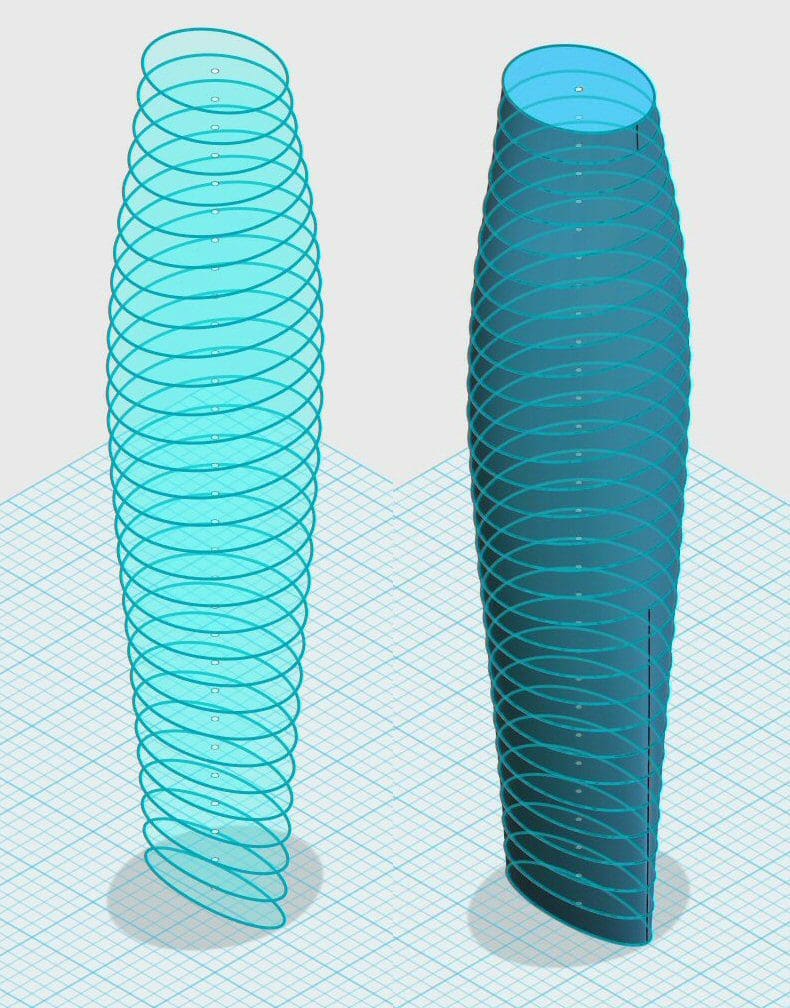
The tube was constructed using several carefully spaced ellipses sharing the same longitudinal axis and whose dimensions were canopy width and twice its height at a given position along the length. Using the 123D ‘Lofting’ command (not available with Tinkercad to my knowledge) the spaces between the ellipses are solid filled; Fig.3 shows the ellipse stack left, lofted right.
It will become clear shortly, but the next task was to construct a further ‘solid’ tube, but of 1.2 mm reduced ellipse radii throughout. Both tubular structures were saved in the universal .stl format and further work continued using Tinkercad.
Tinkercad has a very useful feature in that any object shape at, one mouse click (actually two, select the item first!), can be rendered a ‘Solid’ or a ‘Hole’, possibly better described as a ‘shape hollow’ in the latter. For example, placing a hole overlapping or inside a solid, grouping the two (click and drag) and clicking the ‘group’ button causes the solid shape to be hollowed out by the hole where the two are coincident. The remaining part of the original hole disappears. I will cover a further most helpful use of the ‘hole’ function later for when a structure becomes busy.
Back to the canopy. Using the hole function, with the larger tube set as a solid and the smaller tube as a hole, I carefully aligned the two forms such that their longitudinal axis were coincident. Following a drag to select the two, a group command then produced the hollow tube I was after. This in effect was two canopies stuck together lengthwise in mirror image.
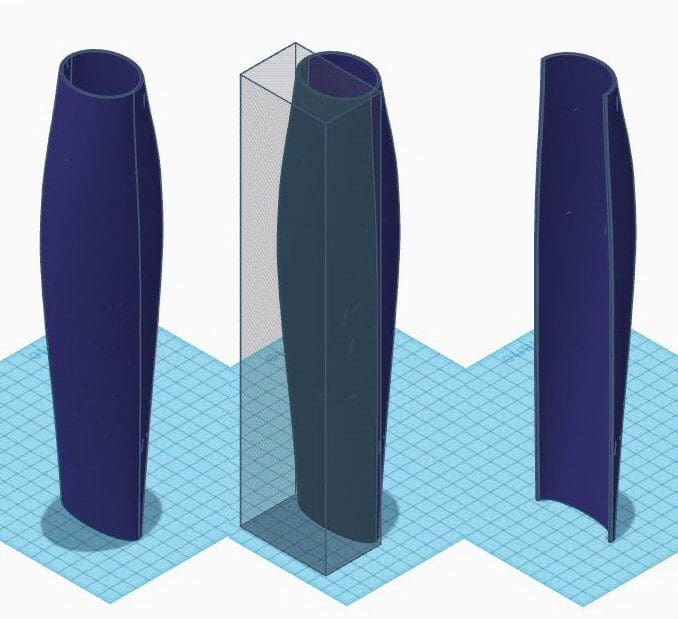
Using a cuboid hole of appropriate dimensions (easily formed), I was able to remove one half of the canopy duo to produce the single item I wanted. Fig.4 shows the three latter stages of this process. A further similar operation using a tilted cuboid produced the forward canopy chamfer. Hey presto, a 1.2mm walled canopy!
A couple of other internal additions were made; a dowel fixing point for the front and a small rare-earth magnet slot added at the rear to mate with a F3 secured bit of bent bean tin to keep it all in place. Ah, the mix of technologies! A mock blade aerial was added at the rear as a grab point for opening.
That’s great I thought, then the ‘Doh!’ moment. Standing on its end the canopy would be taller than the maximum height the printer could reach! I should clarify here that printing the canopy horizontally would not work.
Printing lengthwise and progressing a print at 450 or less from the horizontal (e.g., across the curved canopy top) rarely results in a happy outcome. As the print elevation angle reduces the next layer of print is increasingly supported by thin air, which is not good! It is possible to simultaneously print supports that can be removed later but it can get complicated and messy, so I did not want to take that route.


So, what to do? Using the now familiar cuboid shaped ‘holes’ in Tinkercad, I chopped the long canopy into two and added an internal former to each of the mating faces. You need two canopies for this, of course, and copy and paste (Ctrl C & Ctrl V) works fine in Tinkercad, as with other software, so multiple copies of one’s masterpiece are not a problem.
As an aside, I usually copy what I am working on at a critical point, turn it into a ‘Hole’ and park it well off to the side of the workspace as backup.
One advantage of a two-piece canopy is that two colours may be used, as I did. The internal joining formers were two copies of the same design, which included three M3 holes. Bolted up, post print registration was perfect. On an early design I removed the M3 bolts one by one and applied my hot glue-gun. The outcome was a very secure structure, but one has to be careful not to melt the print job too much!
Figures 5 and 6 show the completed designs for the two canopy halves to which I added a couple of cooling air scoops on the rear section. Both solid and transparent Hole examples are given, the latter to demonstrate the usefulness of the function to indicate internal structure. Note that I elected to remove the thinner part of the blue cross panel at the join yet leave the complimentary yellow section in place for rigidity.
EDF HOUSING
Having designed, built and fitted the canopy with moderate success, I was buoyed up and started to look at the EDF housing in detail.
I set out to do this and printed a few fan housings using principally the techniques described previously. Intake area matched the fan swept area etc. It all worked but it looked a little cumbersome at 65mm fan diameter. I was overcome by the feeling that it ‘didn’t look quite right’ and was oversized for the model, and vaguely reminiscent of a trumpet! We have all been there!
Was this to become a project destined for the hangar corner? On re-reading one of the small EDF RCM&E plan articles by Tony Nijhuis, I tumbled to the idea of employing one of his recommended 50mm FMS 3S EDF units – significantly smaller yet still offering useful thrust. I decided to give it a try and ordered one, plus an ESC, from 4-Max.
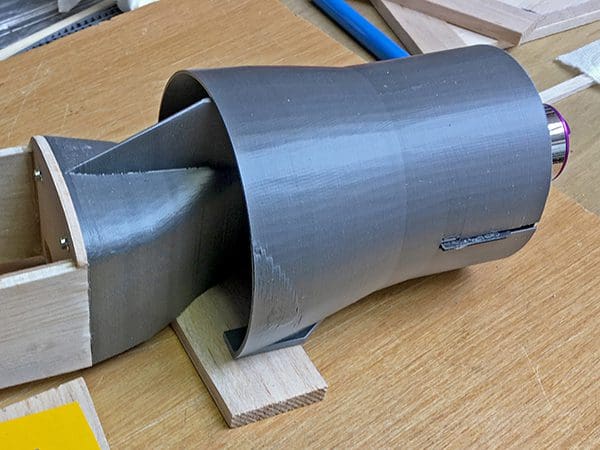
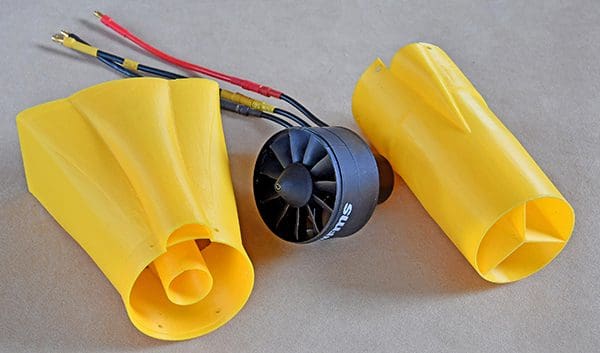
Duly received (and in quick order!) a major rethink was clearly required. A straightforward two-part design was decided upon, with the EDF being effectively clamped between the intake and outlet that were secured together courtesy six small self-tapping screws. A spine on top would carry the cables from the rear of the EDF forward. But how to design such a thing that could be printed?
INTAKE
I elected to start with the intake. One aspect of 3D printing is that it helps the process significantly (makes it possible even!) if the print commences with a reasonably sized area that will provide good adherence to the print bed. So, a flat surface corresponding with the form of F3 widened to add the two 1/8″ fuselage sides, with 1.2mm added to the height for the canopy thickness. A further 1/4″ was added to the bottom of the modified F3 outline. This was in consideration of the wing depth over which it would be positioned. The over-wing 1/4″ excess was removed prior to printing to give a near conformal fit at the trailing edge.
I elected to move on from 123D Design and look at Fusion 360 for the intake build. I found it an excellent piece of software, but it required me to watch on-line tutorials galore in order to figure out how to use it. In addition to ‘Lofting’ capability, I discovered it had a ‘Shell’ command, which can be used to hollow out a solid object whilst retaining a wall of specified thickness. Just what I had been looking for and perhaps what I ought to have used for the canopy!
One of the essential things I learned early on was that you should avoid sitting in front of the screen and design freehand; the more complex a design the more the rule applies. You need to plan and define dimensions well in advance and record them. If you want to tweak something later it really helps to know what you started with.
To get good mechanical fits I found myself adjusting design sizing in 0.05mm increments or less at times. Surface texture and thermal movement are two variables that contribute to ‘final fit’. I found it helpful to produce a number of small test pieces in the chosen material. Prints do not always turn out the exact size you design for. They may be close but not necessarily exact!
Returning to the intake, the principle method was to produce a small number of cross sections, line them up at the appropriate separations and engage ‘Loft’ and ‘Shell’ commands, a 1.2mm wall thickness being dialled up for this part too. One challenge was the spinal tube that was required to carry the EDF cables. My solution was to design two shells, one with the spine and the other without, but using the similar basic cross sections. Using Tinkercad, I chopped off the spine and added it to the spineless version. Having now the form I sought, I needed to make an internal hole at the forward end to allow the cables to pass through to the ESC.
This is where the Tinkercad ‘Hole’ feature came in very useful. Turning the near completed intake structure to a ‘Hole’ rendered the assembly transparent but with all major internal construction outlines clearly visible. The position where a feed-through could be positioned without structural interference was easily viewed. Being able to rotate the form in all axes is an absolute plus for this process.
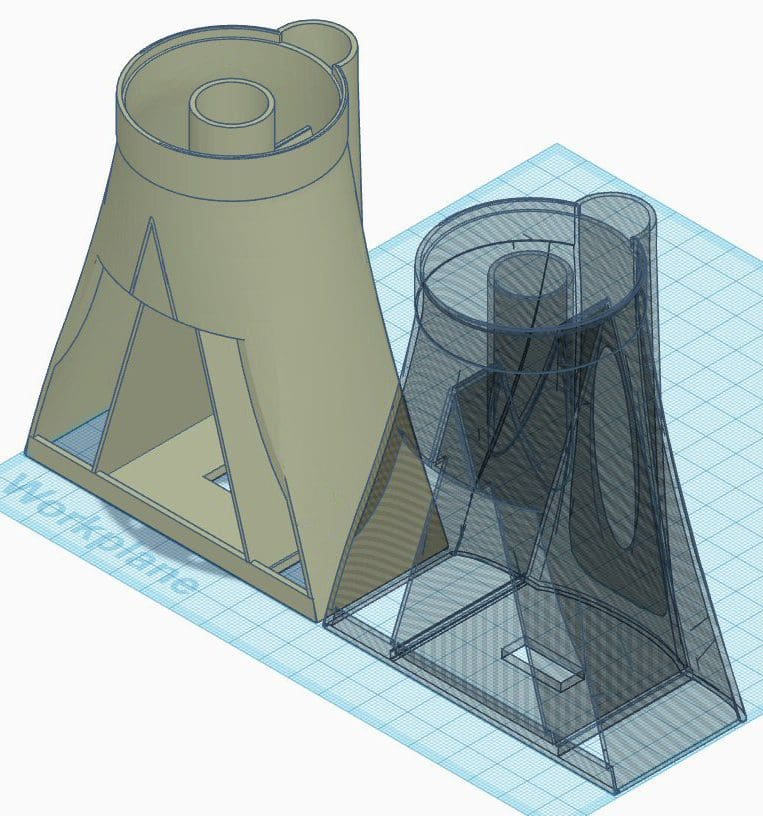
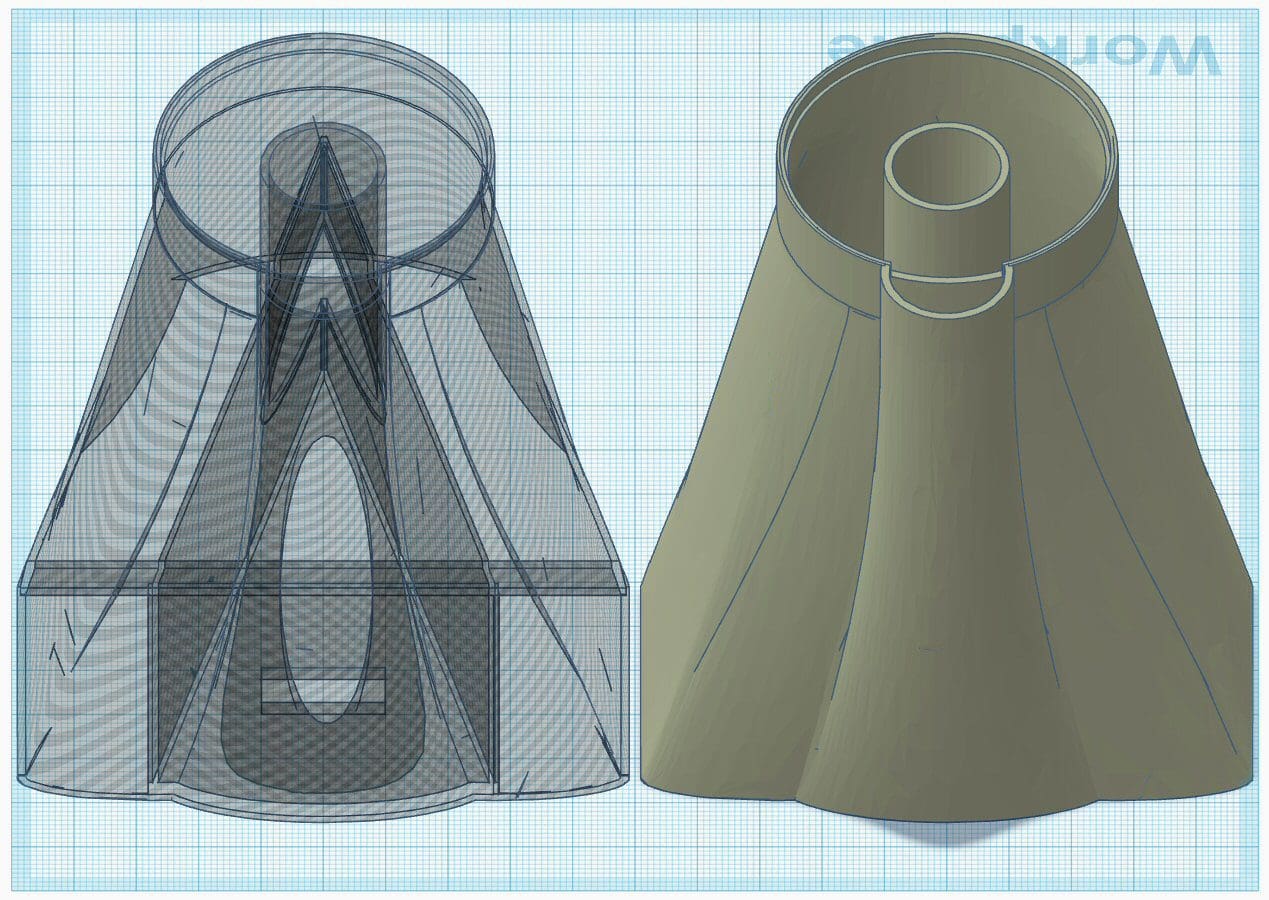
Job done, the whole hole (!) was then returned to ‘Solid’ in one mouse click. The final additions were the flat inlet side walls and an axial central tube, the outside diameter of, and aligned with, the fan spinner. Transparent Hole and Solid images of this component are shown in Fig. 7 & 8.
OUTLET
Following the same principals, the outlet EDF section was software assembled. Within this part I included a conical streamlining tail to go behind the motor with the hope of reducing turbulence aft; whether it does improve matters or not will have to be the subject of future work. It seemed a good idea at the time! I found a web reference that indicated such a streamlining cone should not exceed a 300 taper. Outlet wall/skin thickness was set to 0.8mm for the purpose of minimising weight, with the exception that 1.2mm was retained for strength where the two overlapped.
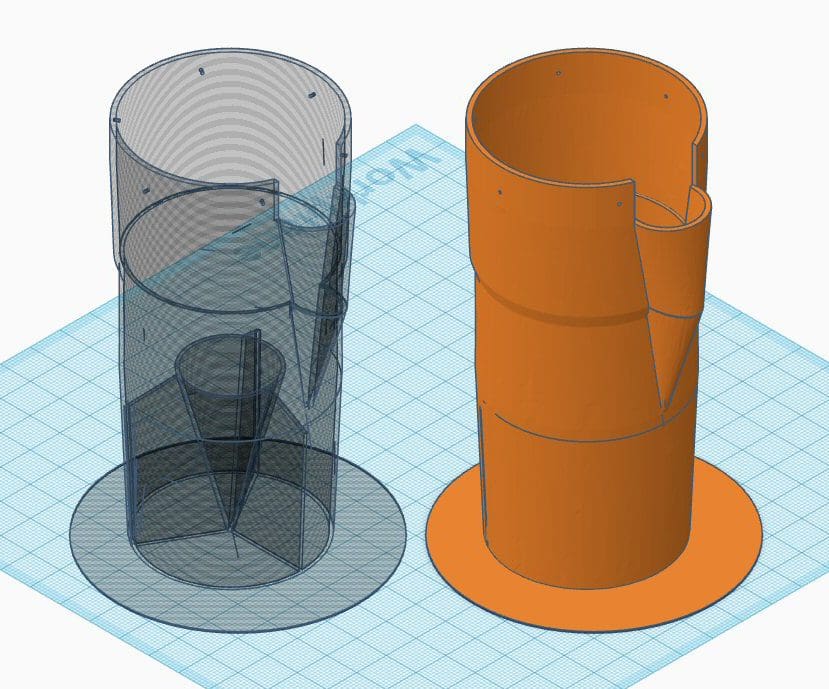
I did wonder about the 0.8mm section but it appears satisfactory. It is thin but the structure bears little load and seems rigid enough. It has remained intact after several flights. The three cone fin supports I inserted 1200 apart likely contribute to this. Transparent Hole and Solid images of this component are shown in Fig 9. Note the paper-thin island included for object stability during the print process.
As a general point, alluded to in the Intake section, a 3D print having minimal base print-bed contact area is usually best ‘drawn’ over a thin flat base (island) to ensure no displacement during the printing process. Displacement = disaster = start again! A relatively wide island, having a depth of a small fraction of a mm, can be added to the design once complete. This will be printed first, with the object of your desire continuing to be printed on top and a thin island can be removed easily post build.

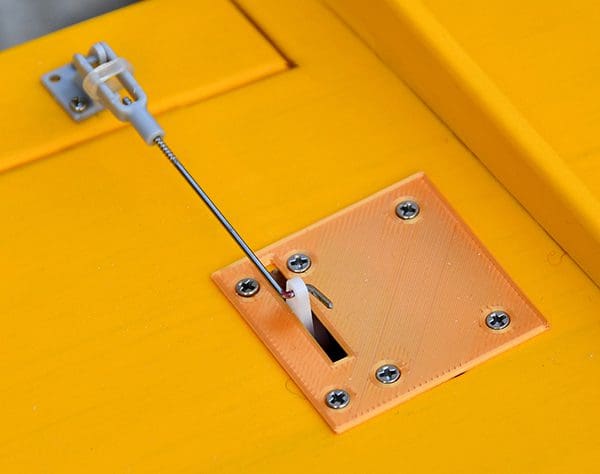
The final outlet cross sectional area was a matter for consideration. Reading various internet references, 85% of fan swept area seemed to be favourite, so I settled for that. As an addition, I included 3D printed wing servo mountings, conformal with the top wing surface and slightly protruding below. Unfortunately, my Savox servos are more than the 1/4″ wing thick thickness! Upper and lower surfaces are shown. Note also the simple 3D printed elevator servo bracket.
ALL DONE!
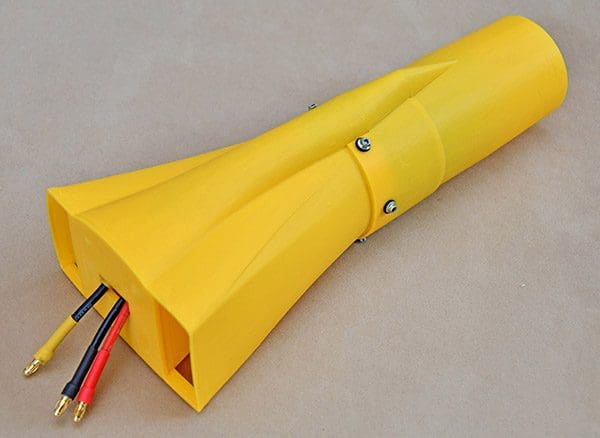
The completed power unit weighed in at 6oz (168 grams) with the EDF installed. Rod Laden’s magazine article indicated the Pushy Cat’s target weight to be 28oz (795g). Complete with a 2200 mAh 3S 35C LiPo, my model’s RTF weight came in at just 0.5oz (14g) over – the closest I have ever got to a target weight!
Using the kitchen scales static thrust was measured as 1lb 2oz (511g), so with a thrust/weight ratio of ~0.65 I felt quietly confident that it would fly.

FINAL TEST
The power unit was bolted to F3 and the great day dawned for the maiden. With a slightly nose-down hand launch courtesy of club member Kim off went my new jet. It had power a plenty, being fast on full throttle, very manoeuvrable but on rails, yet quite happy stooging around on half power. On full chat it will do wide, fast loops. Flight times are of the order five minutes but, as always, that is dependent on throttle use.

If I suffer an accident that results in a 3D component fracture I will simply go home, switch on the Prusa, set it to print a replacement and settle down for a relaxing coffee.

In summary, I believe I have successfully blended the old with the new in my Pushy Cat adaptation and highlighted an avenue that complements traditional build methods and is perhaps worthy of further exploration.
Ron Laden’s original plan is available at: www.sarikhobbies.com/product/pushy-cat/