My first rubber powered autogyro inspired by S.R.Crow's record-breaking design from the 1930s.
- This article was first published in 2005.
I can trace my interest in autogyros back more than 50 years, to the copy of F J Camm’s Model Aircraft Handbook which, as a youngster keen on making small rubber-powered models, I’d been given for my thirteenth birthday.
The book featured a plan for a design by S.R. Crow which, in 1936, had set the duration record for rubber-powered autogyros – a record which I believe it still holds to this day. As far as I can remember, Crow’s model rotor had a diameter of about 20”, its blades being held on with rubber bands. Each half of the tail-plane had adjustable incidence, which had to be set to counter the torque of the propeller, while the rotor mast could be moved along the fuselage to adjust the centre of gravity. Anyway, Mr Crow’s design inspired me to begin some experiments of my own, starting with simple rotors made from balsawood, which I tested by dropping them from the bedroom window and watching them spin to the ground. The best-performing rotor was then attached to a stick-type fuselage with a tailplane, rudder and nose-weight, and hand-launched as a glider.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
Encouraged by the results of these experiments and the invaluable lessons in trimming, and C of G that they afforded, I went on to design and build a rubber-powered autogyro of my own, which though it flew successfully, never put Mr Crow’s endurance record in danger!
 Spindrift was my design from July 2000 and my first electric machine too.
Spindrift was my design from July 2000 and my first electric machine too.
INVESTING IN R&D
Whilst all that was back in the ’50s, now that I’m in retirement, I’ve found myself drawn again to the challenge of designing and flying autogyros. This time, however, I decided to forsake rubber power in favour of electric flight technology.
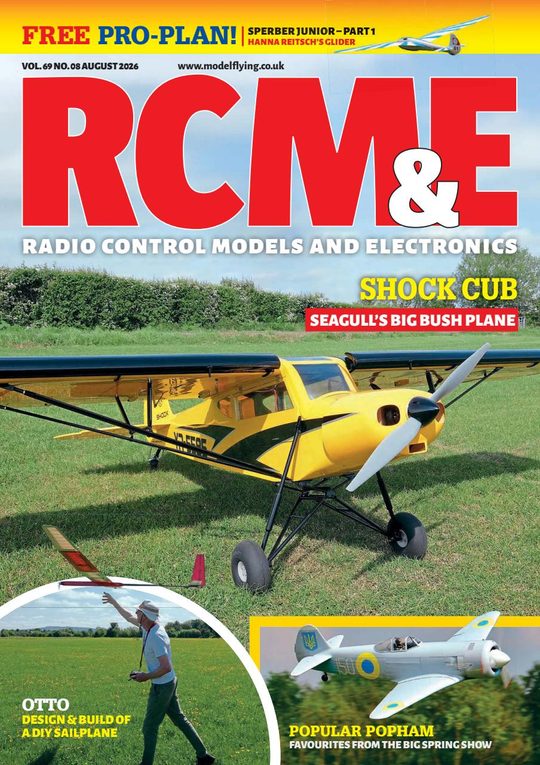
My first attempt, the Spindrift, began to take shape in 1999, though the rotor hub, to which the blades are attached, called for an extensive period of research and development. I need to find ways, for example, to allow each blade to move vertically in order to help balance out the different amounts of lift generated by the advancing and retreating blades during flight, while also making provision for the blades to pivot horizontally so as to absorb any loads to which they might be subject in the event of a heavy landing.
Much of what I learned during this R&D process was gleaned at the Wallis Days 2000 gyroplane rally, an annual event that celebrates the achievements of Wing Commander Ken Wallis of Wallis Autogyros fame. I was able to discuss the features and details of both the full-size machines and my model with helicopter pilot Woody DeSaar and with Ken Wallis himself. I’ve since become a regular at the Wallis Days events, at which I’ve not only met up with a other model gyro’ flyers but, after half a century’s interest, finally experienced gyro’ flight for myself in Woody’s Twinstarr gyroplane.
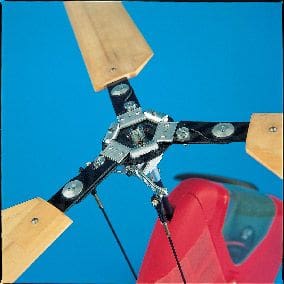 Weighing 19.25oz, Spindrift's rotor spanned 36". The early rotor-head was quite complex.
Weighing 19.25oz, Spindrift's rotor spanned 36". The early rotor-head was quite complex.
FROM QUALITY CONTROL…
Since my first experiments with Spindrift, I’ve built several electric-powered model gyroplanes that have all made it into the air. As with most model planes, each one possesses its own particular flying characteristics, but the denominator common to their individual successes is the care taken in the design of the rotor assemblies, and the accuracy with which they were constructed. To help ensure consistent standards when modelling these parts, I’ve collected a number of ‘quality control aids’, such as sanding blocks that are profiled to produce the required airfoil section in the rotor blades, a simple but effective blade balancer, and various tools for bending and setting the wire hinges of the rotor hubs.
The rotor blades themselves are made of balsa, with bass wood leading and trailing edges (bass is heavier and stronger than balsa, and also has a finer grain, so that it can be shaped to give quite a thin trailing edge) and plywood for the root-to-hub attachment points. The blades for the indoor model are finished with sanding sealer and non-shrinking dope, while those for the heavier outdoor models are skinned with glass cloth. No special aerofoil section is used, but they approximate a thinned-out, flat-bottomed Clark Y – a section popular in free-flight and rubber-powered models. The blades’ thickness / chord ratio, meanwhile, varies between 8% and 10% according to the model. To aid tracking and stability, I also fit small lead weights to the tips of the blades.
FLIGHT CONTROL
All of the models I’ve built have direct-control rotor heads, moved in pitch and roll by two servos set up using the transmitter’s elevon mode. Control response tends to be lively, particularly in the roll axis, so I use a measure of exponential to smooth things out. Two of my models (Pushkin and Grasshopper – see photos) also use a third servo for rudder control.
 Grasshopper spans 36" and weighs 14oz.
Grasshopper spans 36" and weighs 14oz.
Despite their name, autogyros require you to manually set the rotor spinning; autorotation only comes when you have forward speed. With the models that I’ve made so far, however, this requires nothing more than a flick of the finger: the thin-section blades spin-up readily, and produce plenty of lift with relatively low drag, so that the models will fly quite happily under only moderate power. For instance, the blades on Rondel, my indoor model, have an 8% section and gain flying speed within just a few strides if you’re hand-launching the aeroplane, or after only a short take-off run. Interestingly, because of the blades’ profiles and the fact that they’re set up with zero incidence (in other words, the flat under-surfaces all lie in the same plane), the rotors can be spun-up in either direction.
AUTO WHAT?
Autogyro, gyroplane, or gyrocopter – call ‘em what you like, but they can all trace their origins back to the autogyro designed by the Spaniard Juan de la Cierva in 1923. Like helicopters, an autogyro uses an overhead rotor to generate lift, which is controlled by varying the pitch of the rotor blades. That, however, is about as far as the similarity goes. For while helicopters are complicated contraptions involving power-driven rotors whose torque has to be counter-acted by tail rotors, autogyros are much simpler. Their main rotor is free-spinning, being powered only by the airflow that’s generated as the machine is pushed or pulled through the air by a conventional engine and propeller. Once the rotor’s up to speed, it flies like a wing – air doesn’t pass through it, but under and over it. This means that, providing the aircraft maintains forward speed, it can fly and land even with its engine stopped. The tail surfaces, meanwhile, provide for control of the aircraft in the same way as a conventional aeroplane, but afford greater manoeuvrability.
 Pushkin weighs 12.5oz and spans 36".
Pushkin weighs 12.5oz and spans 36".
Editor's note – There has been a surge in Autogyro interest over the last few years notably thanks to the good work of Rich Harris, Tom Wright and many others. Rich and Tom post regularly on this forum so check out the Autogyro section which contains build blogs etc. Richard's Panther plan, an autogyro trainer, was included with RCM&E's March 2013 issue.