
So, metal or plastic gear? What's it to be?
This tutorial is all about servos, how they work, how to fit them and which one's to choose. First let's look at how they operate.
ANATOMY
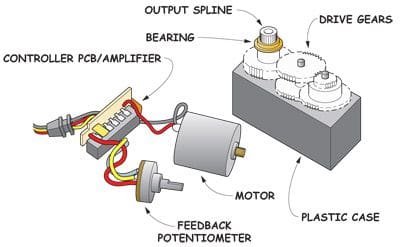
No matter what the size or type, the components that make up a servo are practically the same, and knowing what these parts are will help you make more informed choices on what servo to buy.
Enjoy more RCM&E Magazine reading every month.
Click here to subscribe & save.
Circuit board. This is the servo’s brain, taking incoming signals / pulses and converting them into a corresponding voltage that’s passed to the motor, which in turn drives the output shaft. The circuit board is the main difference between the digital and analogue servos mentioned earlier. On an analogue servo, the controller sends power to the motor about 50 times per second – considerably slower than the 300 times per second of a digital servo. This, then, is why digital servos are more accurate and better at responding to inputs and holding position. It also explains why they consume more power.
Motor. The motor turns the output shaft, usually via a series of gears (more on that in a bit). Most servos use a simple brushed motor, although more expensive examples use coreless motors. The advantages of a coreless motor over a brushed motor of the same size are greater longevity, faster response times and more torque. Nothing comes for free, though as coreless motors are more costly due to the use of more expensive materials. Oh, and they also draw more current. Notwithstanding, for high performance applications, coreless motors are the way to go. It’s unlikely that anyone reading this won’t have heard of brushless motors, which have elevated electric models to unprecedented levels of performance, indeed brushless motors are now finding their way into servos, offering even better performance and longevity than coreless motors yet equalling the low power consumption of a brushed motor.
 Knowing what's in the case can help when it comes to selection.
Knowing what's in the case can help when it comes to selection.
Gears. The motor alone isn’t strong enough to turn the output shaft directly, so a series of gears are used to increase the torque. The way in which a servo is geared directly affects the speed and torque rating, and it’s common practice for manufacturers to take a servo and gear it slightly differently to produce either more torque or speed, and then sell it under a different name. If you shop around you can often find ‘high torque’ or ‘high speed’ versions of a given servo.
The gears in a servo are generally made either from a plastic (often nylon) or some form of metal. Plastic is good for many club models, but if you’re flying something aerobatic with big surfaces, or maybe something fast like a jet, then metal gears are the way to go. 3D helicopter pilots also favour metal gears.
Naturally metal gears are much tougher than nylon and less likely to shear or shatter. A variety of metals are used; brass, steel and titanium are prime examples, and some servos use a mixture. All metals work fine to start with, but expect brass to generate slop quicker than the others, especially if used in a high vibration environment, e.g. a model with a petrol engine. Titanium, on the other hand, has great longevity and I rarely hear of any serious slop developing with these gears.
Metal gears cost more and don’t tend to mesh as well as nylon gears, so expect a tiny bit more play than a plastic-geared servo. In my F3A models I actually prefer plastic gears for this reason, since a good nylon geartrain is virtually free of any slack. You’re probably wondering how I can get away with using plastic gears in an 80” (2m) span aerobatic model? Fact is, you don’t use a great deal of throw in F3A. Even for things like fast snaps, plastic gears seem to hold up fine. But for 3D models of around the same span and beyond I always go for metal if I can. In fact, I’ve stripped plastic gears in 3D models as small as 40” (1m) span!
The output shaft on a metal-geared servo is also metal, so be sure to apply threadlock when securing the servo arm so that the retaining bolt doesn’t vibrate free; this can (and does) happen. Never use threadlock on plastic-geared servos mind, they don’t need it and threadlock can corrode the plastic. If using a metal-geared servo it’s best to use a metal servo arm, too. You can get away with plastic, but when fitted to a metal spline, these can strip.
Potentiometer. Also known as a ‘pot’, this is basically a variable resistor which, as it’s rotated, alters the voltage passing through it, and is used in servos to feed the position of the servo arm back to the controller. The pot is connected to the output shaft so that as the servo arm moves so does the pot, by the same amount. By measuring the voltage passing through the pot, the controller can figure out where the servo arm is. If this is different to where it should be, then the controller keeps moving the arm until it’s in the right place.
Pots do get worn out over time and can get dirty, thereby delivering erroneous readings that can lead to jittery or inaccurate servo operation. A bad pot is a rare occurrence, though.
Output shaft. This can be supported in one of two ways, either by the case itself (sometimes with a metal insert to act as a bush) or with a ball race bearing. The latter is better, offering less resistance, less play and much reduced wear. Some premium servos use two bearings, supporting the shaft at both ends.
 The good old standard servo still has plenty to ofer although many pilots now fit affordable sport digitals.
The good old standard servo still has plenty to ofer although many pilots now fit affordable sport digitals.
Superseding the escapements used by pioneering R/C modellers, the servo has had the responsibility of transferring nimble (or not so nimble!) Tx inputs to model control surfaces for many years. But there’s more to them than that; they also have a huge influence on a model’s performance, a lesson I learned having swapped out the poor quality servos in one of my aerobatic models in favour of much better units. The old servos didn’t centre accurately or quickly enough, meaning that flick rolls ended up all over the place. In contrast, the speed and accuracy of the high-quality replacements meant I could stop the manoeuvre exactly where I wanted.
Nowadays we’re spoilt for choice when it comes to servo selection and whilst that’s a good thing it can also be bewildering. So, let’s take a look at the different types there are, how they work and how to go about choosing the correct ones for the job.
SIZE MATTERS
The physical sizing of servos can be broadly classed – smallest to largest – into four main segments: micro, mini, standard and giant scale.
 The good ol' standard servo.
The good ol' standard servo.
- Micro servos weigh from as little as 0.03oz (1g) up to around 0.42 – 0.45oz (12 –13g) and are suited to smaller models, typically indoor aircraft or outdoor foamies such as those offered by RC Factory or Telink.
- Mini servos more-or-less fill the gap in-between micro and standard, although I know of some .50 size aerobatic models that use mini servos in order to save weight. The power output of these smaller units now meets (or sometimes exceeds) that of some standard servos, which begs the question as to why we don’t all use minis in place of standards, to save weight? Well, the answer comes in the form of a single word… Cost!
- Standard servos, such as the Futaba 3001, JR 591 and Hitec 311, are found in most (if not all) .40 – .50-size club trainers and similar-size aircraft. Weighing between 1.4 – 2.8oz (40 – 80g), with high performance servos weighing the most, there’s a huge range in this size that can fly anything from .40-powered aircraft right up to 120” (3m) machines and fast jets.
- Giant servos are larger than standards and used to be quite popular where extra power was needed, but with the standard jobs able to offer previously unheard of levels of torque, speed, toughness and durability, giant-scale servos are rarely seen, an exception being the range of monster servos produced by Seiko. Some large aircraft use multiple standard servos to drive one surface, indeed I’ve seen as many as four servos linked together to move a single rudder. That said, one Seiko servo can replace all of these.
There are other sizes too, often used for specialist applications:
 Slim wing servos are now affordable.
Slim wing servos are now affordable.
- Low-profile – designed for the thinner wings of aerobatic models.
- Ultra-thin wing servos – intended for glider wings, these employ special mounting lugs and sit on their side.
- Retract servos – high torque, low profile servos with approximately 180-degrees of travel that allow a mechanical retract to lock up and down.
TORQUE AND SPEED
Two figures you’ll often hear about when servos are mentioned are torque and speed, arguably the most important parameters in determining how a servo performs. It’s not a case of simply having the most torque or the fastest servo, it’s a matter of getting the performance that’s right for the application. I’ve yet to see a servo that is both insanely fast and has bags of torque. A small number come close, but these are very (very!) expensive.
Torque is a measure of how strong a servo is. Think about torque as the servo’s muscle. The more torque, the larger the force can be exerted on the control surface. So, if you’re building something with big surfaces or you plan on flying seriously fast, having enough torque to move the surface against the airflow will be a prime concern.
Servo torque is measured in kilograms per centimetre (kg / cm). For example, your average cheap and cheerful standard servo produces 4kg / cm of torque, which means it can produce 4kg of force 1cm away from the centre of the output shaft. The further away from the output shaft you go, the less force is produced; so 2cm away from the shaft would measure 2kg of force, and 4cm away just 1kg. Surely, then, it’s best to connect linkages as close to the shaft as possible? Well, no, the amount of torque transferred to the control surface is determined by the relationship between servo arm and horn. If the linkage is mounted 2cm along the servo arm (measured from the centre of the output shaft) and 2cm away from the control surface hinge line, then the servo’s specified torque rating will be applied to the control surface since a 1:1 ratio is being applied between the servo arm and control horn. If the control surface linkage is mounted 1cm away from the hinge line (typically to increase throw) the ratio changes, with only half the rated torque of the servo acting upon the surface. In the case of our 4kg / cm servo, this means that only 2kg / cm of torque will actually be applied at the surface. However, what’s lost in torque can be gained in throw.
 Choices! Multiplex's Tiger servos offer a choice of high speed or torque.
Choices! Multiplex's Tiger servos offer a choice of high speed or torque.
If we change the linkage yet again such that it’s fixed 4cm from the hinge line, then although less throw is available the torque figure rises to 8kg / cm. Not bad! This has effectively doubled the torque without spending any extra money on bigger servos.
As you can see, it’s a compromise between having sufficient torque and enough throw. Be wary of setting up a linkage such that you get bags of throw for those crazy stunts, leaving very little torque in reserve. If the servo can’t hold the control surface in place then that surface may start to flutter and a crash could result. If I need to tone down the rates on my Tx I usually go back and change the linkage to achieve a mechanical reduction in throw, that way I get some extra torque as a bonus.
Servo speed is measured by how much time it takes to travel through an arc. The most common unit of measurement is seconds per 60°. So, for example, if a servo claims to have a speed of 0.20 sec / 60° then it takes a fifth of a second for the servo arm to move through 60°. Now 0.20 sec / 60° is a fairly standard figure, and a servo thus rated (maybe even a smidgen slower) will be fine for many sport and scale applications. Aerobatic models need something a bit quicker, my personal choice here being servos faster than 0.15 sec / 60°. In fact, I’ve used some as fast as 0.09 sec / 60°, and I can feel a real difference in how the model reacts. Control response appears much more instant and as a result the aircraft feels better to fly. Now I’m not suggesting that you need to retro-fit all your models with super-fast servos. Far from it. I’m just trying to illustrate how I interpret servo specifications and use the information to find the best servo for my particular requirement.
Some manufacturers quote speed differently, measuring over a 45° arc rather than 60°. So, be careful when comparing servos like-for-like.
Torque and speed figures are quoted for a range of supply voltages. Servos generally operate at 4.8V and 6V, with some recent high voltage additions operating at 7.4V. Servos always perform better at a higher voltage but not all can handle more than 4.8V, so beware. As always, check the instructions and, of course, ensure that all the components of your radio system are also compatible with a higher voltage. Using a 2s Li-Po to power a high voltage system is common, although a regulator is needed because a fully charged pack is actually putting out 8.4V.
A final word on servo specifications: Manufacturers have been known to exaggerate their figures, sometimes by quite large amounts! So do take things with a pinch of salt. Generally you can trust the ratings of the more established brands, but that doesn’t mean that you should discount the new names. Some relatively late players in the servo scene have found lots of fans in high performance aeromodelling, in areas such as 3D helicopter flying.
DIGITAL VS. ANALOGUE
Servos can be split into two types, analogue and digital. Generally speaking, digitals cost more than analogues because they’re more complex. Put simply, digital servos are faster, have much better holding power and greater accuracy. This is due to the design of the circuit board within the servo (more on this later). Now, all that extra performance sounds great, and it is, indeed I use digital servos in my aerobatic models almost exclusively. However, they do consume more power than analogues. So, if you make the switch to digital ensure your battery is up to the task and be prepared for a reduced number of flights. You’ll also need to tread carefully as not all digital servos are great. I’ve seen digitals costing nearly £30 each that aren’t as accurate as a £10 analogue!
 For presicion and good centering, digital servos are a natural choice.
For presicion and good centering, digital servos are a natural choice.
Always do some research before purchase; online forums are a good source of information but be wary of people who vehemently defend a brand, even if it has its faults, exaggerating claims of accuracy or performance.
Don’t be alarmed if, when you first try digital servos, they constantly make a screaming noise. This is normal, even when you’re not touching the sticks. It’s simply proof that the servo is doing its job and working against the weight of the control surface. They’re much noisier than analogues, even when there’s little load on them.
Some high performance digital servos now come with a metal case in order to dissipate the extra heat generated. By keeping the servo cooler it will perform better throughout the flight. The fact is, if servos get excessively warm or hot in use, they can start to slow down and produce less torque.
INSTALLATION
A mistake that’s often made when installing servos into an airframe concerns the orientation of the four brass eyelets that (usually) come supplied. These pass through rubber grommets that locate into the corners of the servo case, providing a rigid mount for the fixing screws. It’s important that they’re fitted such that the lip sits on the underside of the grommet, between the servo and its mount, thereby isolating the servo from the rest of the airframe and reducing the amount of vibration transmitted to it. Take care not to overtighten the mounting screws, just tight enough to hold the servo in place will do nicely, without distorting the rubber grommets. If they’re distorted then they won’t absorb vibrations as well.
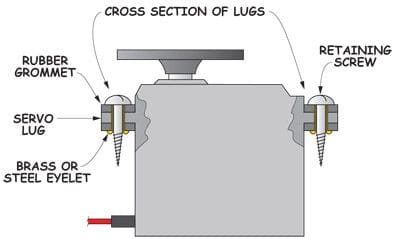 Make sure those eyelets are the right way round!
Make sure those eyelets are the right way round!
OPERATION
Examine the lead coming from a servo and you’ll see there are three individual wires. Typically (but not always) the red and black wires carry power to the servo, the remaining wire the signal that tells the servo what to do.
There’s no industry standard as far as servo wiring is concerned. I know of people who have ruined perfectly good servos because one manufacturer decided to have the power leads on their servos the opposite way to the ‘norm’. Be careful, then, and choose wisely to make sure this doesn’t happen to you. The plugs on the end of the wire vary, too. The two most common types are Futaba and JR, they vary mainly in the fact that Futaba uses a locating lug whereas JR doesn’t. Micro servos may use lightweight plugs such as Micro-JST that are to be used with a special Rx, and there are also universal plugs that will fit either Futaba or JR types.
Although servos vary greatly, they all operate on the same principle. Known as Pulse Width Modulation (PWM), a series of electrical pulses are sent along the signal wire to the servo, the duration of each pulse corresponding directly to the position of the servo arm.
Here’s how PWM works. Let’s say, for example, the ‘width’ (duration) of the pulse can vary from a minimum of 1 millisecond (ms) to a maximum 2ms, and a pulse duration of 1.5ms is telling the servo to stay at the centre. Now, if the servo is sent a pulse that’s 1ms long, then the servo arm will move to, and hold, an angle. Since the smallest possible pulse (1ms) was sent, the arm is at its minimum position; let’s call this -60°, i.e. 60° left of centre. If we then send a signal of 2ms then the servo arm will move to its maximum position of +60°, i.e. 60° right of centre. Sending a pulse of 1.5ms will return the arm to the centre (neutral) position.
In between pulses the servo is essentially switched off, which is why pulses are sent many times per second. The exact pulse width values that correspond to minimum, maximum and centre servo arm positions are specific to each brand of servo, but aren’t usually dissimilar.
PROGRAMMABLE SERVOS
There was a time when, if you needed multiple servos to drive a single control surface (e.g. two servos to move an aileron), there was the added complication of a little black box to make sure the servos matched and didn’t fight one another. Fighting servos are bad news, causing excessive battery drain, increased wear and tear and, in the worst case, complete failure. These little black boxes (such as JR’s Matchbox) worked well but added to the expense and complexity of a servo installation.
A welcome change in practice came a few years ago when Hitec introduced programmable servos, closely followed by examples from Futaba and Spektrum. Things like neutral and end points can be programmed individually on each servo, independently of the Tx, meaning that multiple servos operating a single control surface can be matched without the added complexity of a Matchbox.
MAGNETIC ENCODERS
Earlier I mentioned the problems that can be caused by a worn or dirty potentiometer. Well, the good news is that a servo is now available that does away with the pot entirely. Instead of a pot, then, it uses a magnetic encoder to sense the position of the servo arm. Manufacturer of the unit, Hitec, claims this unit to have greater precision, longevity and resistance to dirt. No doubt this technology will find its way into other servos in the future.
 Metal gears might seem a logical choice but many F3A pilots say that tighter nylon gears deliver better presicion.
Metal gears might seem a logical choice but many F3A pilots say that tighter nylon gears deliver better presicion.
THE RIGHT ONE
There are no hard and fast rules to selecting a servo, it really is down to what you require and, if you’re building a model from a kit, the recommendations made by the manufacturer. For example, they may quote a minimum torque requirement for the various control surfaces that goes something like this: “The rudder requires a metal geared servo of at least 15kg / cm torque.” Other times they may quote weights. For small electric models it’s common to read things like: “This model is suited to servos weighing between 9 and 15 grams.”
One bit of advice I would give is to ensure there’s sufficient torque available. Having too much is never a bad thing, but having too little can be disastrous. Just as important as having enough torque is having an adequate gear train. Consider whether you can use regular nylon gears or need the strength of metal gears.
And what about speed? Well, it’s only worth spending the extra cash to get a fast servo if you really need it. For aerobatics and 3D flying, using fast servos is critical, enabling you to nail those manoeuvres every time. Faster servos also make you feel more attached to the model, almost as if you’re sitting in it yourself! But for most sports / club models speed isn’t crucial, torque is the more vital factor.
There are a number of avenues you can go down to narrow your search for the right servo. Why not see what everyone else is using? The internet is a good place to start, by searching the various online forums. Perhaps you could start a topic of discussion? Knowledgeable clubmates are a good source of information, too. You can also check the size of the servo cutouts in your model, indeed measuring these up will yield clues as to what size servo you need, and hence narrow down your search.
FINALLY
Always go for the best you can afford. And if you’re in any doubt, choose a servo that exceeds what you actually require. There’s no use in saving £5 on a servo if it’s just not up to the job. It may work fine on the ground, but fast-flowing air over the control surface in flight might render it unable to move, resulting in a crash and the destruction of that £500 airframe! There’s no doubt that servo selection becomes easier as you gain experience. When I first started flying I was bowled over by the choice available, but after talking to other modellers and researching magazines and the internet I quickly formed a picture of what was going on.


